机构名称:
¥ 6.0
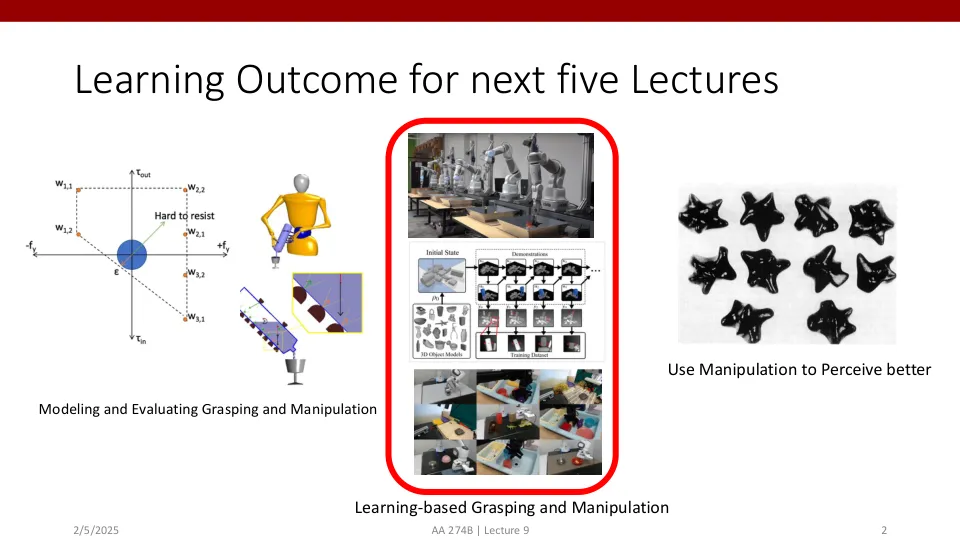
结合了学习和分析模型,以预测感觉数据的作用效应。Kloss等。 2020。 IJRR 2020。 K. M. Lynch,H。Maekawa和K. Tanie,“通过使用触觉反馈来推动操纵和主动感测。”在IROS,1992年。Kloss等。2020。IJRR 2020。K. M. Lynch,H。Maekawa和K. Tanie,“通过使用触觉反馈来推动操纵和主动感测。”在IROS,1992年。
机器人自治的原则II
主要关键词


相关文件推荐