机构名称:
¥ 1.0
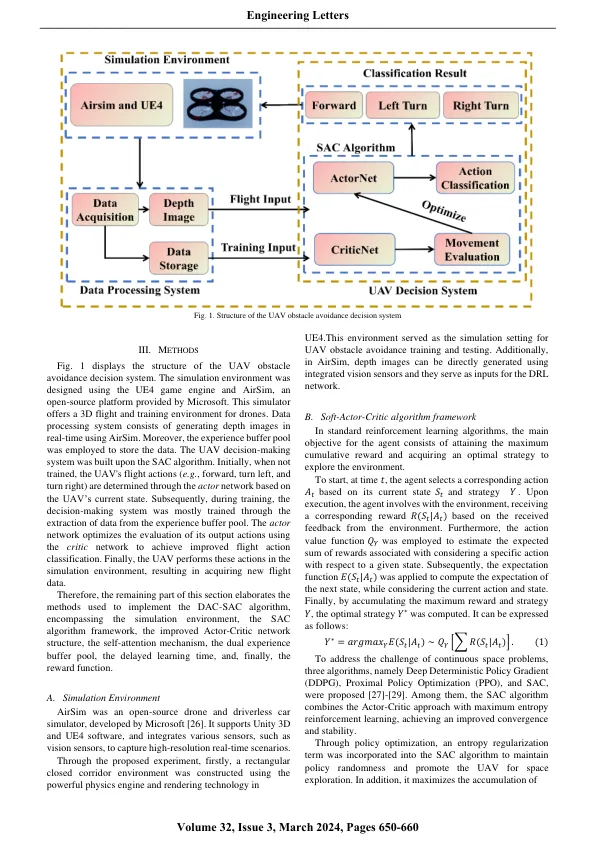
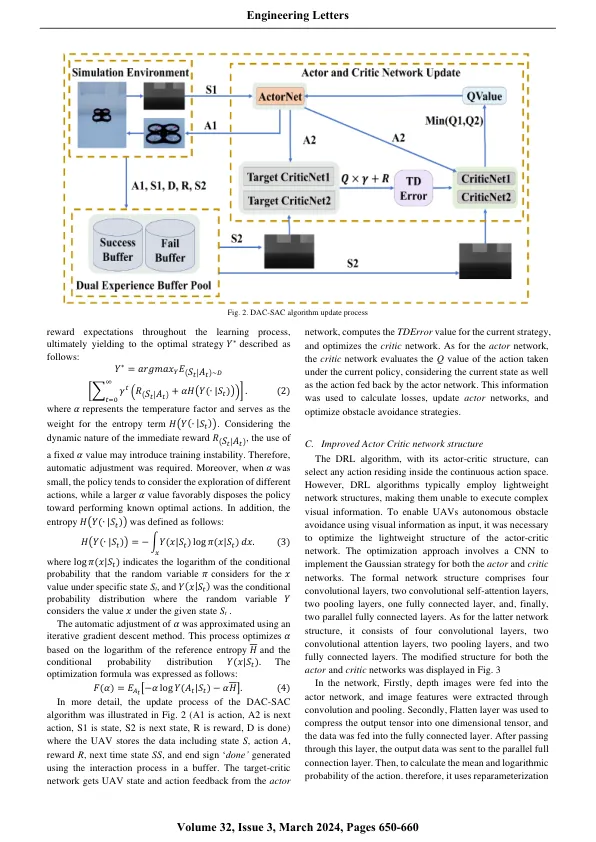
摘要 - 为了克服自动飞行中无人驾驶汽车(无人机)避免障碍物的挑战,本文提出了双重体验注意力卷积软卷积 - 批评者(DAC-SAC)算法。该算法与卷积网络集成了双重体验缓冲池,自我注意力的机制和软性批判性算法。由于缺乏成功的培训数据,双重体验缓冲池用于解决无效的无人机培训问题。为了克服处理图像数据中原始软演员 - 批评(SAC)算法的缺点,应用了卷积神经网络(CNN)来重建参与者和评论家网络,从而可以更好地提取图像特征提取和分类。此外,通过向网络添加卷积自我发项层来采用一种自我注意的机制。此修改可以根据不同输入图像特征对注意力重量进行动态调整,从而有效解决与焦点相关的挑战。进行了两个模拟实验,并且在处理未知环境时,DAC-SAC算法在已知环境中达到99.5%的成功率,成功率为84.8%。这些结果证实,即使将深度图像作为输入,提出的算法也可以避免无人机的自主障碍。
无人驾驶的自治障碍算法...
主要关键词


相关文件推荐