机构名称:
¥ 1.0
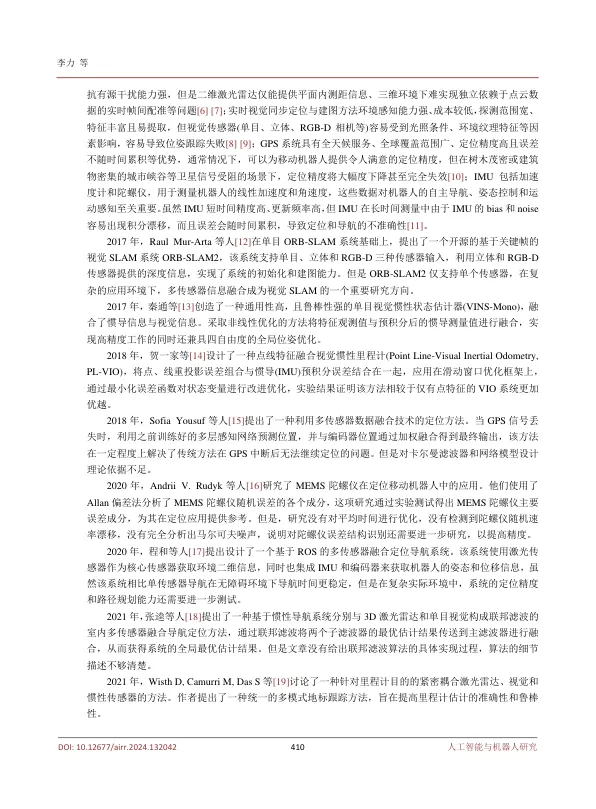
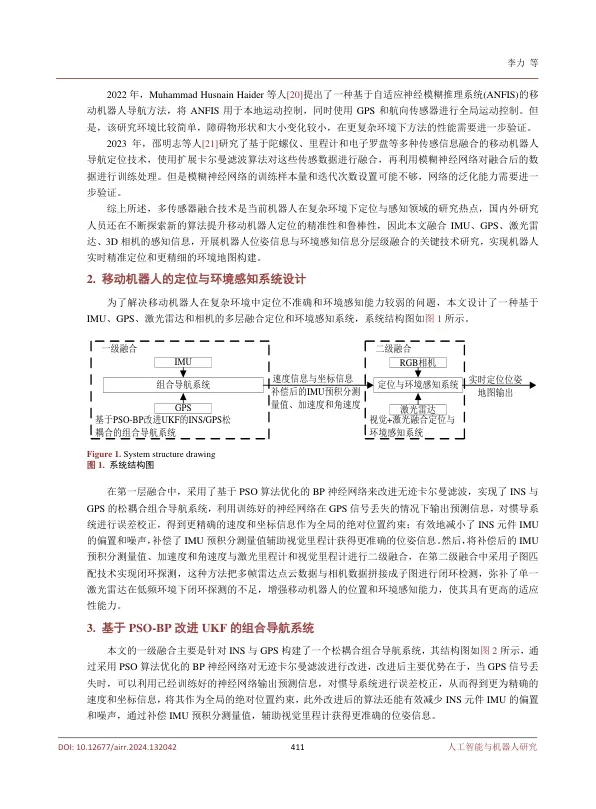
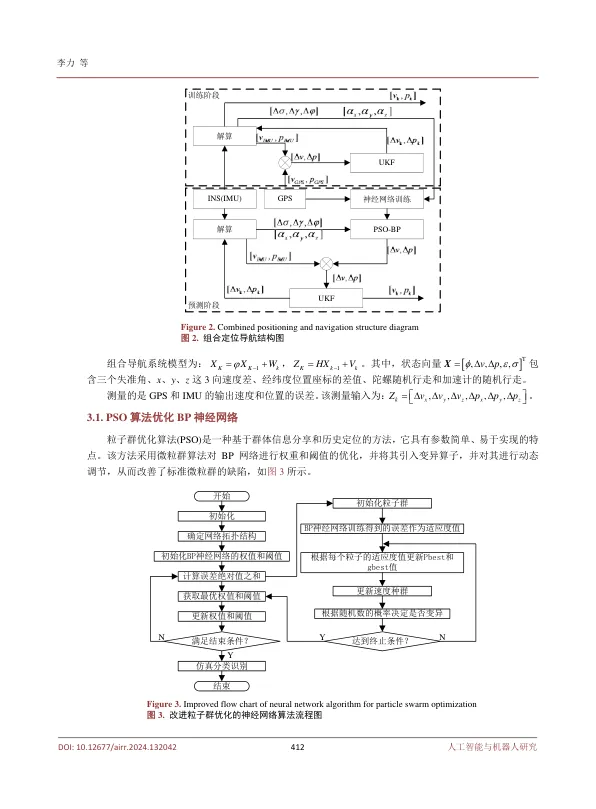
本文重点介绍了位置准确性低的问题和在复杂环境中移动机器人的不良环境感知性能。它基于IMU和GP的机器人姿势信息和环境知觉信息进行了关键的技术研究,以检测机器人自己的姿势信息,以及激光雷达和3D摄像头,以感知环境信息。在“姿势信息融合层”中,粒子群处理算法用于优化BP神经网络。没有偏见的卡尔曼过滤,并实现了未经意识的卡尔曼滤波器,以实现INS-GPS松散耦合导航,从而减少了INS组件IMU的偏见和噪声。此外,当GPS信号丢失发生时,训练有素的神经网络可用于输出预测信息,以进行惯性导航系统的错误校正,提供更准确的速度,并将信息作为绝对位置约束。在环境感知融合层中,补偿的IMU预一整合性调查分别与次要水平分别与视觉探光仪和激光镜探测融合。这使机器人的实时精确定位和环境图的更精细结构。最后,使用实际收集的轨迹来验证算法,以进行multi传感器信息的两级融合。实验结果表明,该算法提高了机器人的定位准确性和环境感知性能。机器人运动轨迹和原始真实轨迹之间的最大误差为1.46 m单位,而最小误差为0.04 m单位,平均误差为0.60 m。
基于多传感信息融合的移动机器人定位与环境感知技术
主要关键词

相关文件推荐