机构名称:
¥ 2.0
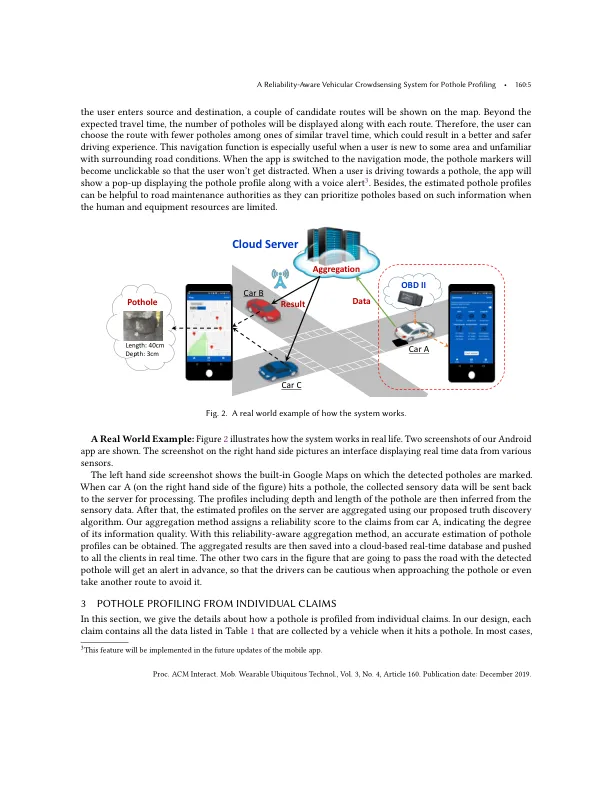
准确地描绘路面上的坑洼不仅有助于消除安全相关顾虑并提高驾驶员的通勤效率,还可以减少交通机构不必要的维护成本。在本文中,我们提出了一种基于智能手机的系统,该系统能够精确估计坑洼的长度和深度,并介绍了坑洼数据收集、轮廓聚合以及坑洼警告和报告的整体设计。所提出的系统依靠车载智能手机的内置惯性传感器来估计坑洼轮廓,并警告驾驶员即将出现的坑洼。由于驾驶行为和车辆悬架系统的差异,构建此类系统的一个主要挑战是如何聚合来自多辆参与车辆的相互冲突的传感器报告。为了应对这一挑战,我们提出了一种新颖的可靠性感知数据聚合算法,称为可靠性自适应真相发现(RATD)。它推断每个数据源的可靠性并以无监督的方式聚合坑洼轮廓。我们的现场测试表明,所提出的系统可以有效地估计坑洼轮廓,并且与流行的数据聚合方法相比,RATD 算法显著提高了轮廓精度。
160 可靠性感知车辆众包感知系统...
主要关键词



相关文件推荐