机构名称:
¥ 2.0
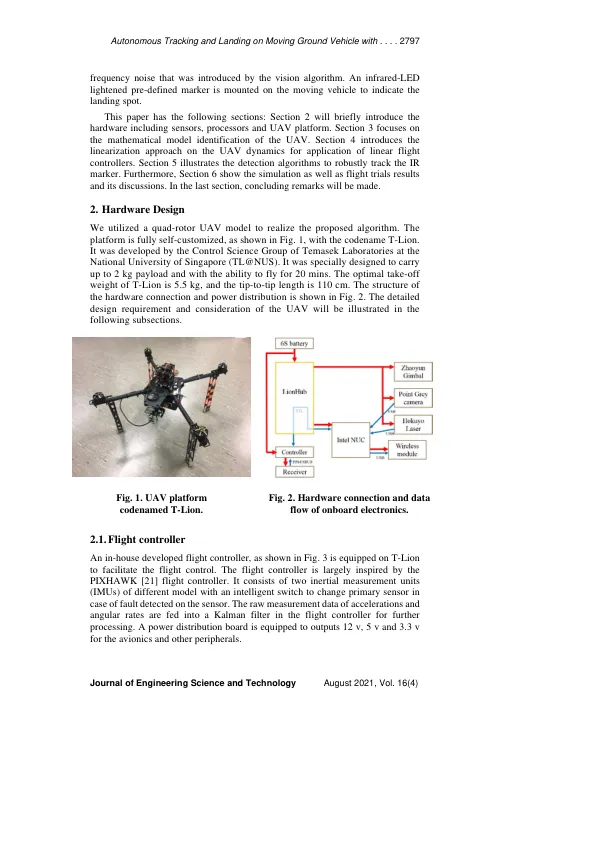
本文提出了一种利用多旋翼无人机跟踪移动地面车辆并着陆的自主系统。详细讨论了该系统的技术开发。包括传感器选择与集成、目标检测算法与实现、无人机数学模型和飞行控制器设计。该系统利用近红外摄像机,即使在夜间或低照度下也能检测到标记,无人机机载处理器频率高达 18 Hz。整个系统首先在 MATLAB 中仿真,然后应用于实际无人机。小型四旋翼无人机在移动的小型卡车上自主着陆的成功飞行试验表明,该设计有效且适用于实际应用。提出的视觉激光目标跟踪性能在静态标记下实现了 99.2% 的成功率,在移动标记下实现了 94.4% 的成功率。
自主跟踪并着陆在移动地面车辆上...
主要关键词



相关文件推荐