机构名称:
¥ 1.0
近年来,许多探测器被发射到月球、行星、小行星和彗星进行科学观测。许多探测器都携带了光探测和测距 (LIDAR) 系统,其测量范围从几十公里到几百公里 [1, 2, 3, 4, 5]。我们已经为远程 LIDAR 接收器开发了定制 IC“LIDARX”,它将安装在火星卫星探测器 (MMX) [6] 上。另一方面,如果航天器降落在月球或行星上进行科学观测或资源勘探,航天器的着陆点通常是未开发地点,这些地点可能并不总是着陆的理想地点。在这些未开发地点进行精确着陆需要三维 (3D) 图像,以便在着陆前立即测量地形、避障和检测相对于地面的姿态。美国宇航局的自主着陆和避险技术 (ALHAT) 项目正在开发一种系统,用于快速自主地识别未来行星着陆装置 GN&C 的安全着陆点 [7, 8, 9]。在 ALHAT 中,Flash LIDAR [10, 11, 12, 13] 被定位为障碍物检测的重要传感器。作为一个典型的例子,2016 年发射的 OSIRIS-REx 使用 Flash LIDAR 进行制导、导航和控制 [14, 15, 16, 17]。Flash LIDAR 是一种以类似于闪光摄影的方式捕获 3D 图像的传感器,通过将激光脉冲散射并照射到相机的视场上,相机会
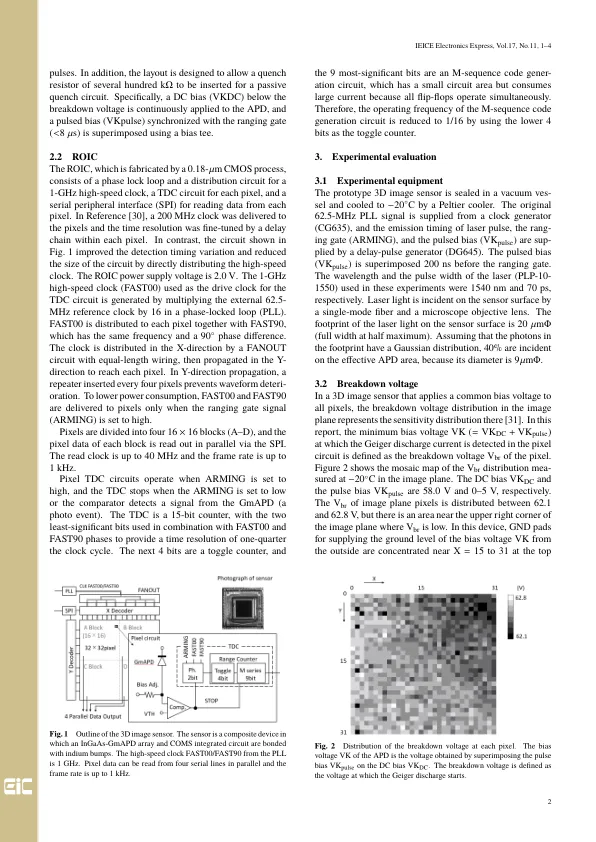
用于人眼安全闪光激光雷达的盖革模式三维图像传感器
主要关键词


相关文件推荐