机构名称:
¥ 1.0
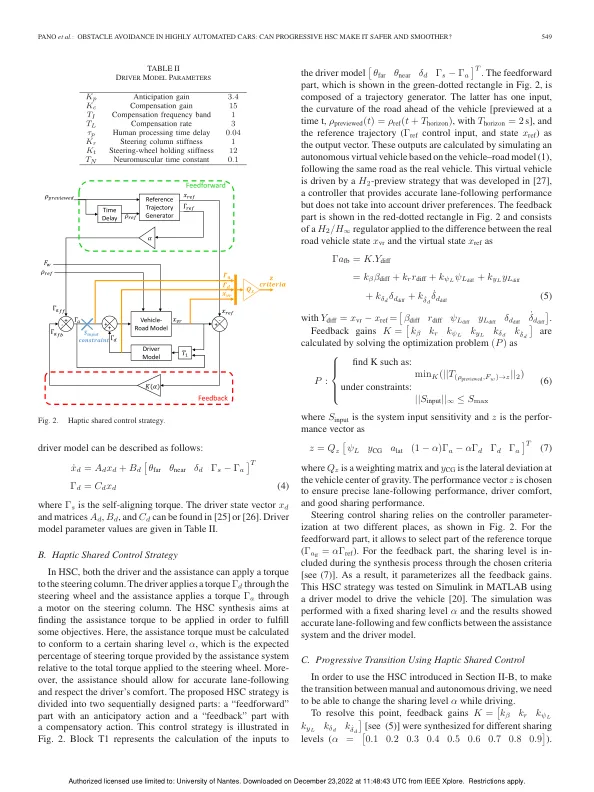
方法来协助驾驶员控制车辆。目前,该方法正在考虑用于制定手动和自动驾驶模式之间平稳过渡的策略。本文有两个目标。首先,它提出采用现有的触觉共享控制策略来实现手动和自动驾驶模式之间的转换,并在驾驶模拟器上对真实驾驶员评估这种方法。其次,它提出在避障环境中评估四种不同的过渡曲线。第一个曲线是从自动驾驶模式逐渐过渡到共享控制模式,然后在越过障碍物后从共享控制模式再次过渡到自动驾驶模式。第二个曲线是从自动驾驶模式逐渐过渡到手动模式。第三个曲线是从自动驾驶模式到手动模式的二元过渡。最后,在第四种条件下,驾驶员超越自动驾驶模式。这些过渡曲线在驾驶模拟器上以曲线和直线进行评估。结果首先验证了使用触觉共享控制策略来执行手动和自动驾驶模式之间的转换。自动化系统和驾驶员提供的扭矩分配与预期共享水平的进展相对应。其次,无论是在转向性能还是主观评价方面,渐进式过渡都比二元过渡和自动驾驶模式的覆盖更具优势。
高度自动化汽车中的避障 - 南特 - LS2N
主要关键词


相关文件推荐