机构名称:
¥ 2.0
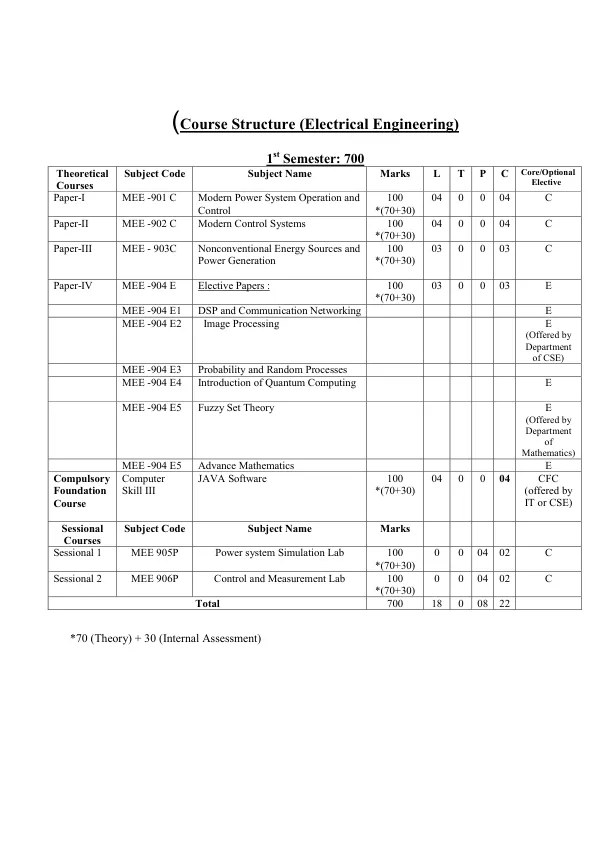
理解 Z 变换、逆 z 变换和离散方程、采样器、保持装置的作用 学生能够分析任何离散数据控制系统的稳定性 分析所考虑的 MIMO 离散时间系统。(状态空间模型、可控性、可观测性) 设计所考虑的离散时间控制系统的状态反馈控制器 为所考虑的系统设计补偿器和离散控制器 教学大纲:采样数据控制系统、采样过程、理想采样器、香农采样定理、采样时间选择、零阶保持(ZOH)。z 变换、ZOH 的逆 Z 变换脉冲传递函数、系统稳定性、z 平面稳定性、极坐标图分析、使用根轨迹图的稳定性分析、Z 平面稳态误差分析、离散时间系统的状态空间模型、可控性和可观测性、通过状态反馈分配特征值、卡尔曼滤波、李雅普诺夫稳定性分析、补偿器设计。书籍:1. BC Kuo,数字控制系统,Oxford2014 2. KMMoudgalya,数字控制,Wiley India2015 3. Gopal,数字控制和状态变量方法,Mc Graw Hill,2014 MEE 903:非传统能源和发电 100 分
特里普拉邦电气工程理学硕士......
主要关键词

相关文件推荐