机构名称:
¥ 1.0
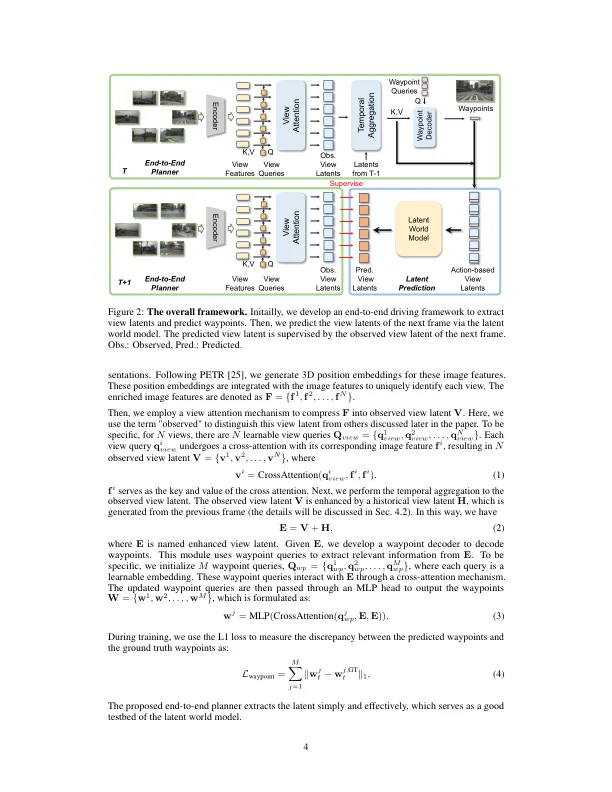
端到端的自主驾驶引起了广泛的关注。当前的最终方法在很大程度上取决于感知任务(例如检测,跟踪和地图细分)的监督,以帮助学习场景表示。但是,这些方法需要广泛的注释,从而阻碍数据量表。为了应对这一挑战,我们提出了一种新颖的自我监督方法,以增强端到端驾驶,而无需昂贵的标签。具体来说,我们的框架法使用潜在世界模型根据预测的自我动作和当前框架的潜在特征来预测未来的潜在特征。预测的潜在功能由将来实际观察到的功能监督。此监督共同优化了潜在的特征学习和动作预测,从而大大提高了驾驶性能。结果,我们的APARCH在开环和闭环基准测试中都实现了最先进的性能,而无需昂贵的注释。
使用潜在世界模型增强端到端自动驾驶
主要关键词




相关文件推荐