机构名称:
¥ 1.0
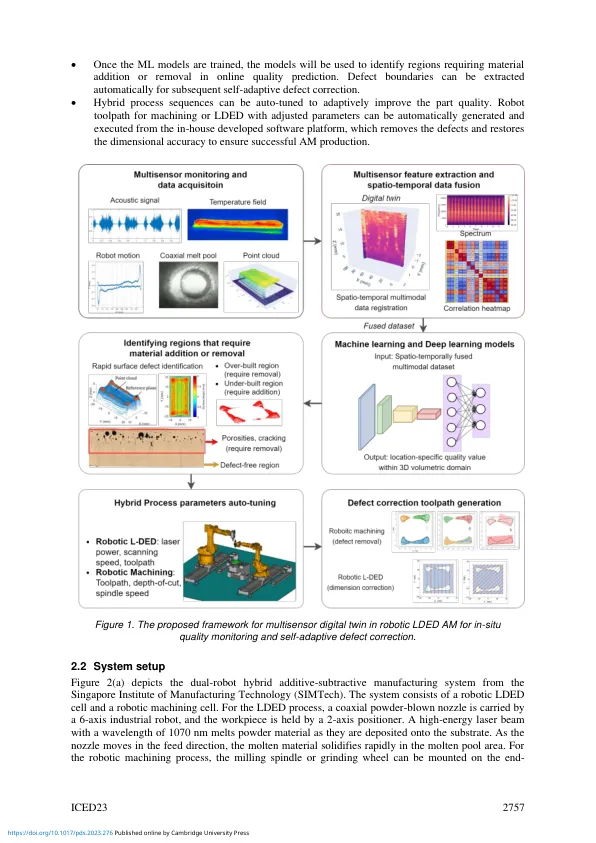
摘要 在增材制造 (AM) 中,及早发现和纠正缺陷对于避免构建失败至关重要。在本文中,我们介绍了一种基于多传感器融合的数字孪生,用于机器人激光导向能量沉积过程中的现场质量监控和缺陷校正。多传感器融合源包括声学传感器、红外热像仪、同轴视觉相机和激光线扫描仪。这项工作的主要新颖性和贡献在于开发一种时空数据融合方法,该方法可在零件的 3D 体积内同步和注册多传感器特征。融合的数据集可用于通过机器学习预测特定位置的质量。可以动态识别需要添加或去除材料的区域。生成机器人刀具路径和自动调整的工艺参数以纠正缺陷。与传统的基于单传感器的监测相比,多传感器融合可以更深入地了解底层过程物理,例如孔隙形成和激光-材料相互作用。所提出的方法为更高效率、更少浪费和更清洁生产的自适应 AM 铺平了道路。关键词:增材制造、工业 4.0、多传感器融合、数字孪生、决策联系人:陈乐群 新加坡南洋理工大学 chen1470@e.ntu.edu.sg
基于多传感器融合的数字孪生加法...
主要关键词

相关文件推荐