机构名称:
¥ 1.0
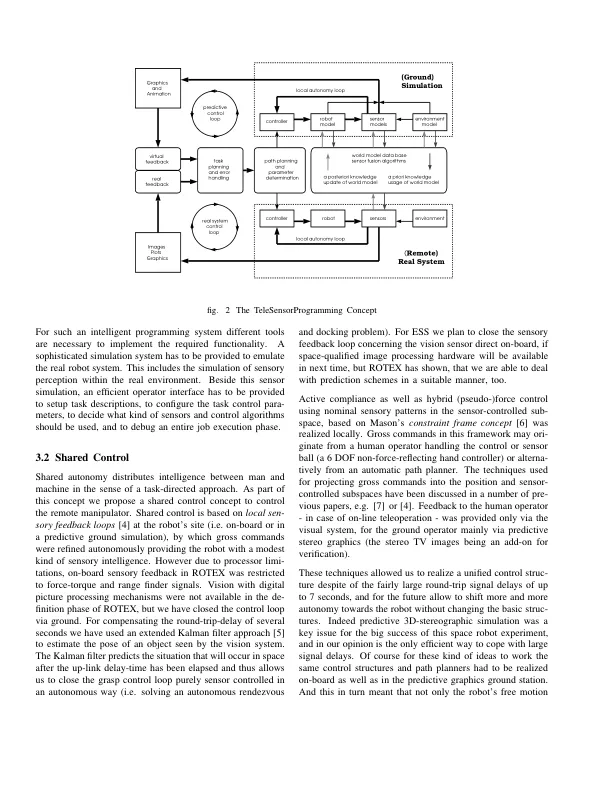
在93年初船上的多感觉机器人成功地以宇航员以及不同的远程动物地面控制模式在官方模式下成功地工作。这些包括在线远程操作和望远镜程序 - 通过在虚拟环境中展示概念来进行学习的技术。实验成功的关键技术一直是其多种抓地力技术,本地(共享的自治)反馈控制概念以及远程自动型地面站中强大的延迟3D形图模拟(预测性模拟)。由于这些概念不再只是想法或效率,而是证明了它们在真实空间中的效率,因此知道如何将其应用于即将到来的太空机器人任务。本文重点介绍了远程动物以及3D图形仿真概念,结合了图像和其他传感器信息,以执行提出的望远镜编程方法。将通过概述实验性维修卫星(ESS)环境来描述原型卫星修复任务的场景,包括捕获和码头的策略。
ESS的远程动物概念
主要关键词


相关文件推荐