机构名称:
¥ 1.0
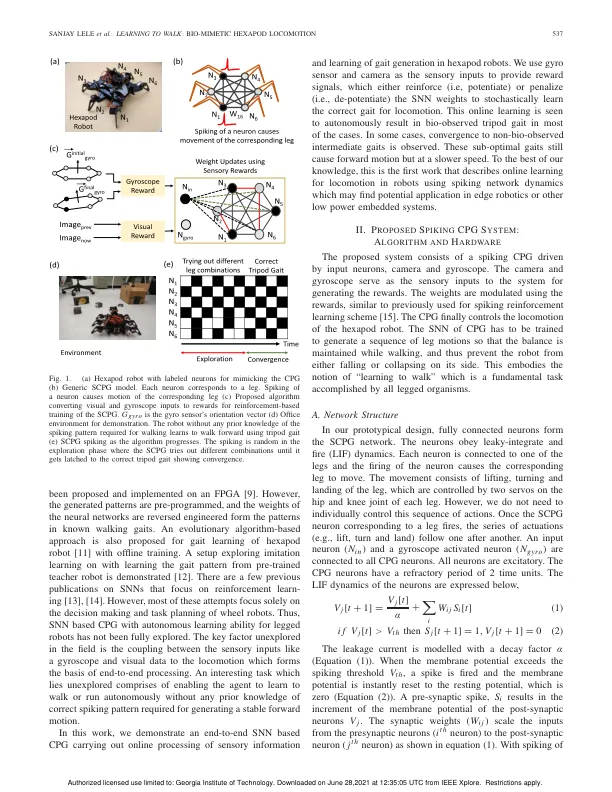
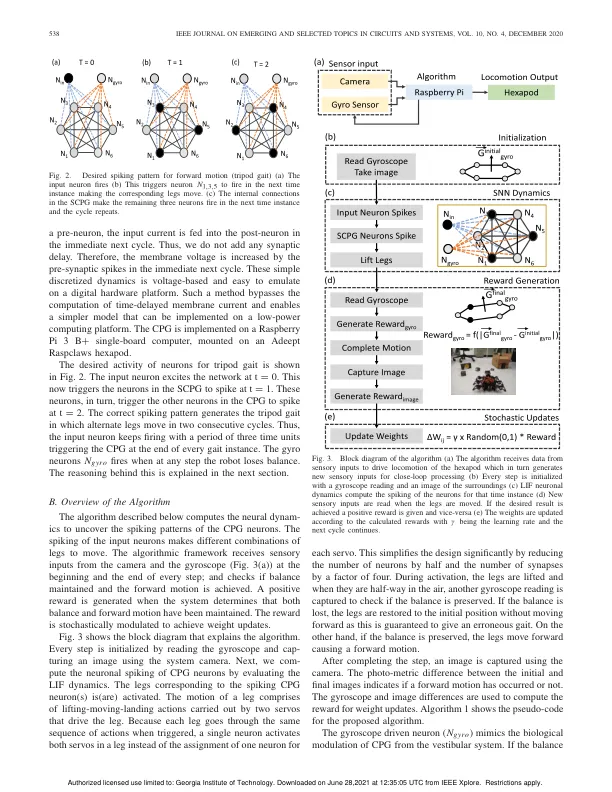
摘要 - 在性能和能量限制下的腿部机器人运动的在线学习仍然是一个挑战。的方法,例如随机梯度,深度增强学习(RL),已经针对双子,四倍和六脚架进行了探索。这些技术在计算密集程度上,因此很难在边缘计算平台上实施。这些方法在能源消耗和吞吐量方面也是不足的,因为它们依赖复杂的传感器和数据预处理。另一方面,神经形态范围(例如尖峰神经网络(SNN))在边缘智能上的低功率计算中变得越来越有利。snn表现出具有突触的仿生峰值时间依赖性可塑性(STDP)的强化学习机制的能力。但是,尚未探索训练腿部机器人以中央模式发生器(CPG)在SNN框架中生成的同步步态模式行走。这种方法可以将SNN的效率与基于CPG的系统的同步运动相结合 - 提供了移动机器人技术中端到端学习的突破性绩效。在本文中,我们提出了一种基于增强的随机学习技术,用于培训刺激CPG的六型固醇机器人,该机器人学会了在没有先验知识的情况下使用生物风格的三脚架步态行走。整个系统是在具有集成传感器的轻质Raspberry Pi平台上实现的。我们的方法在有限的边缘计算资源中为在线学习打开了新的机会。
学习走路:通过...
主要关键词

相关文件推荐