机构名称:
¥ 1.0
使用强化学习的触觉障碍避免动态障碍,以学习在动态障碍物中使用经典控制技术进行许多研究的研究很容易在当地的最小值中固定在当地的最小值中,或者在通过人群海上航行时在本地化中失败。在动态障碍中的最新前卫解决方案主要是为了引起社会符合社会符合性的行为的目的,例如在经过深入强化学习的行人丰富的环境中避免碰撞的环境(2021),通常将激光传感器的近距离位置在包括动力的环境中,这些障碍的位置在范围内避免碰撞(2021)。 模型。为了提高在拥挤的环境中避免动态障碍物的性能,我们旨在为机器人配备触觉智能(在激光传感器之上),这将提供有关机器人周围环境的更多信息,而我们旨在在同一时间促进智能行为,但同时又具有社会符合性的障碍。此附加输入将添加到加强学习管道中,以训练能够有效地围绕动态障碍进行在线路径计划,以根据本地传感器信息进行人群浏览人群。一些测试场景包括挤压附近的两个移动动态障碍,穿过繁忙的门口,传递动态障碍,重新延伸,并在接触或撞击时与动态障碍物反应。❑i²R主管:科学家II
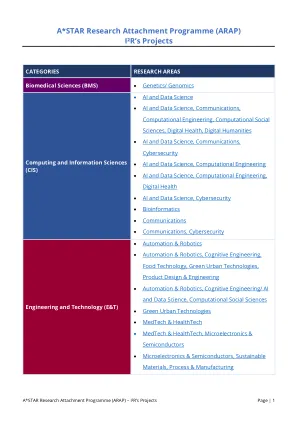
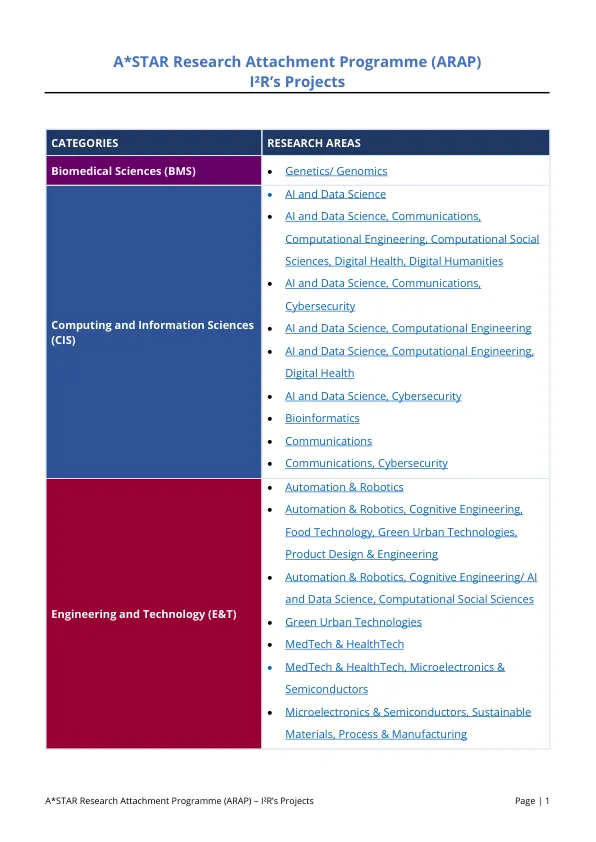
A*星级研究附件计划(ARAP)I²R...
主要关键词

相关文件推荐