机构名称:
¥ 1.0
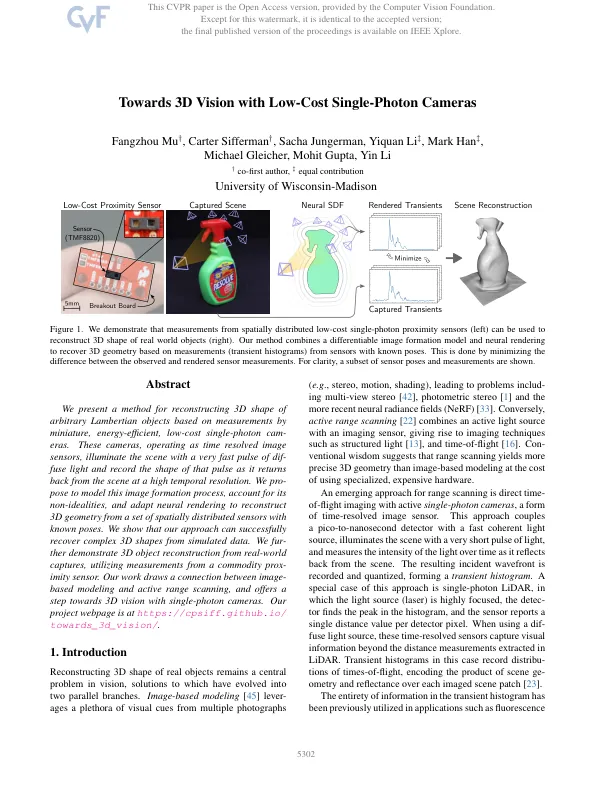
我们提出了一种基于微型,能量,低成本的单光子凸轮的测量值来重建任意兰伯特对象的3D形状的方法。这些摄像机作为时间解析的图像传感器运行,用非常快速的脉冲脉冲融合了光,并记录了该脉冲的形状,因为它以高时间分辨率从场景中返回。我们提出了模拟此图像形成过程的建模,解释其非理想性,并适应神经渲染以从一组具有已知姿势的空间分布的传感器中重建3D几何形状。我们表明,我们的方法可以从模拟数据中成功恢复复杂的3D形状。我们利用商品代理传感器的测量结果来证明实际捕获的3D对象重建。我们的工作在基于图像的建模和活动范围扫描之间建立了连接,并通过单光子摄像机朝着3D视觉提供了一步。我们的项目网页位于https://cpsiff.github.io/ toug_3d_vision/。
朝着低成本单光子摄像机迈向3D视觉
主要关键词



相关文件推荐