机构名称:
¥ 1.0
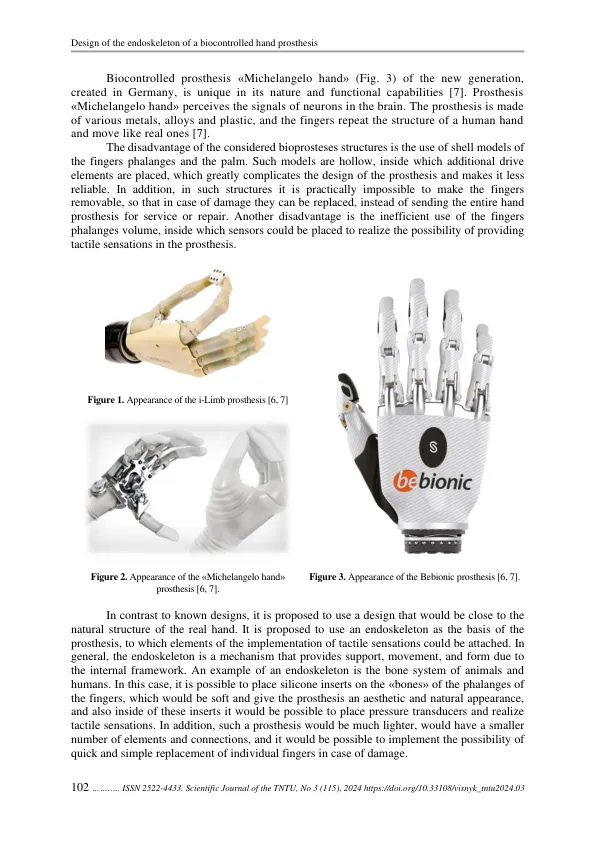
摘要。文章分析了当今假体设备市场上常见的生物控制假体的结构,尤其是I-Limb,“米开朗基罗手”和Bebionic Prostheses。表明,这些构造使用手指和棕榈的空心壳模型,共同形成了假体结构的外骨骼。这种类型的设计的特征是制造的复杂性,因此,由于牵引元素,齿轮元素或其他元素被放置在这些空心元素内,因此成本和不合理使用体积的使用,这可以确保在执行此类手指的弯曲运动时的传输力。本文提出使用内骨骼作为固定电动驱动器和控制元素的支持基础。同时,该结构是一组链式连接的元素和杆,用于传播力,其中确保在所有铰链接头中同时弯曲,并且执行的运动的形式接近自然。同时,在拟议的设计中更合理地使用了手指元件的体积,因为可以在结构杆上固定弹性材料的外部喷嘴,这将重复真实的手指的形状,在执行握把运动时可靠地固定物体。同时,可以在这种弹性体元素中安装传感器以提供触觉感觉。研究的结果是,开发了所有假体内骨骼元素的3-D模型,并通过3-D打印制造。在原型制定阶段,由Arduino Uno模块控制的双极步进电动机用作电动驱动器来评估执行运动的轨迹。证明,由于安装传感器的安装,可以提高功能性,以提供触觉感觉,因此确定执行动作的数量实际上与类似物的数量相同,并且提出的设计的成本要低得多。同时,由于使用少量的结构元素及其连接,可靠性更高。
生物控制的手提假体的内骨骨骼的设计
主要关键词


相关文件推荐