机构名称:
¥ 1.0
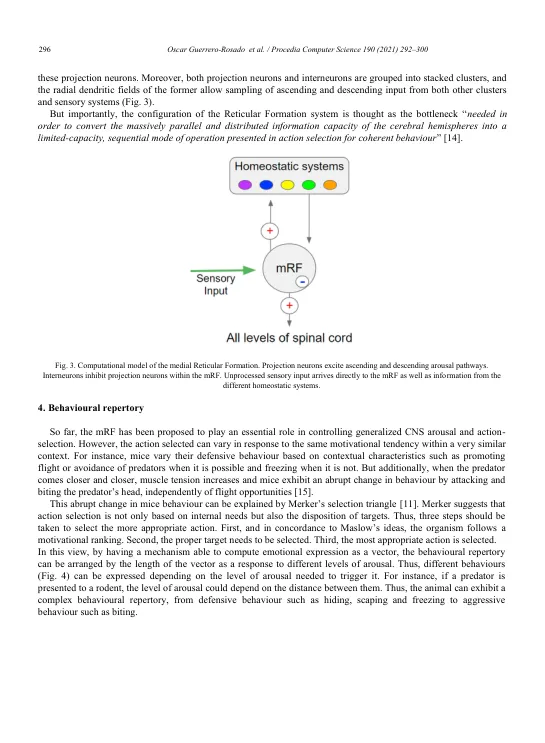
生态环境中的动物不仅会响应外部事件(例如机会和威胁),还会根据内部需求做出反应。因此,生物体的生存是通过调节行为实现的。尽管稳态和异态原则在此类行为中起着重要作用,但动物大脑如何实施这些原则尚未完全了解。在本文中,我们提出了一种新的调节行为模型,其灵感来自内侧网状结构 (mRF) 的功能。该结构遍布整个脑干,并显示出广泛的中枢神经系统 (CNS) 唤醒控制和基本动作选择特性。我们提出,基于 mRF 的模型允许在不同领域实施所需的灵活性,同时它还允许集成其他组件(例如位置细胞)以丰富代理的性能。这种模型将在移动机器人中实施,该机器人将导航复制沙潜蜥蜴的行为,这是调节行为的基准。
基于基本稳态和异态原理的机器人调节行为
主要关键词


相关文件推荐