机构名称:
¥ 1.0
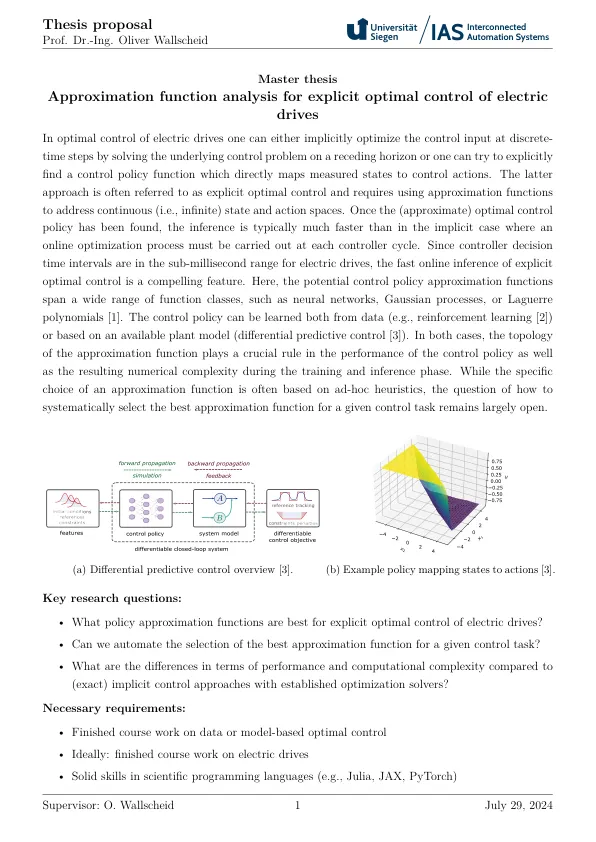
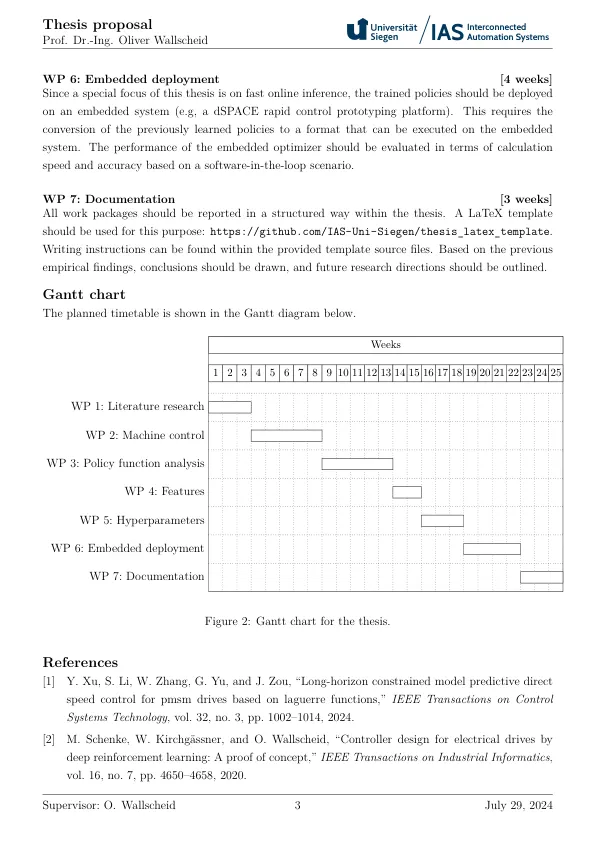
在对电动驱动器的最佳控制中,人们可以通过在退缩地平线上求解基础控制问题,在离散时间步骤中隐式优化控制输入,或者可以尝试明确地找到一个直接映射测得的测量状态以控制操作的控制策略函数。后一种方法通常称为显式最佳控制,需要使用近似功能来解决连续(即无限)状态和动作空间。一旦找到了(近似)最佳控制策略,通常比在每个控制器周期必须在线优化过程进行在线优化过程的隐式情况要快得多。由于控制器决策时间间隔在电动驱动器的子毫秒范围内,因此明确的最佳控制的快速在线推断是一项令人信服的功能。在这里,潜在的控制策略近似函数涵盖了广泛的函数类别,例如神经网络,高斯过程或拉瓜多项式[1]。可以从数据(例如增强学习[2])或基于可用植物模型(差异预测性控制[3])中学习控制策略。在这两种情况下,近似函数的拓扑都在控制策略的性能以及训练和推理阶段的数值复杂性方面都起着至关重要的规则。虽然近似函数的特定选择通常是基于临时启发式方法,但如何系统地选择给定控制任务的最佳近似函数的问题仍然在很大程度上开放。
论文建议近似函数分析...
主要关键词

相关文件推荐