机构名称:
¥ 1.0
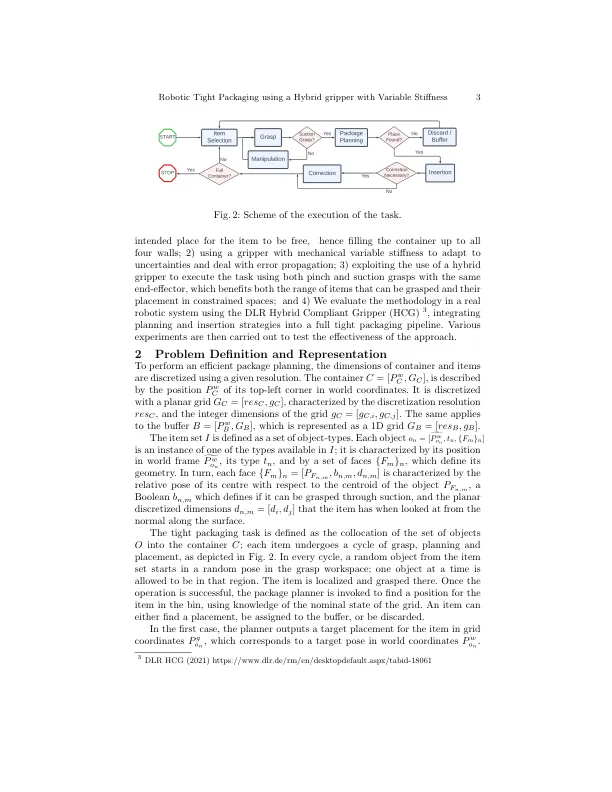
摘要。机器人在仓库自动化中的参与为研究诸如紧密包装之类的逻辑任务提出了新的问题,其中必须以定期和有序的方式完全填充物品,从而使它们之间的最低限度的间隙。这项工作调查了使用具有被动合规性的系统可靠的放置策略的效果,以提高此任务中的鲁棒性和成功率。该方法已集成到完整的管道中,以执行包装操作,并在真实的机器人中评估,使用机械兼容的混合抓地力,具有可变刚度,探索了任务执行中手部配置和刚度级别的作用。沿着不同的评估任务,与琐碎的插入策略相比,由于可靠的插入策略,结果显示出成功率的提高。他们还证明了使用可变刚度减少误差传播的功效。
使用具有可变刚度的杂交抓地力⋆
主要关键词




相关文件推荐