机构名称:
¥ 1.0
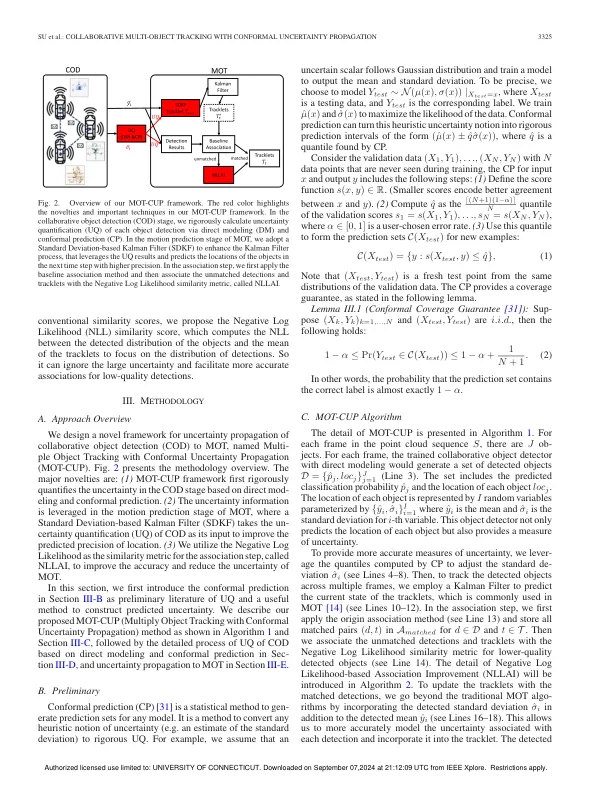
摘要 - 对象检测和多个对象跟踪(MOT)是自动驾驶系统的重要组成部分。准确的检测和不确定性量化对于诸如感知,预测和计划之类的车载模块至关重要,以提高自动驾驶汽车的安全性和鲁棒性。已提出协作对象检测(COD)来提高检测准确性并通过利用多种代理的观点来降低不确定性。但是,很少关注如何利用COD的不确定性量化来增强MOT性能。在这封信中,作为解决这一挑战的第一次尝试,我们设计了一个称为Mot-Cup的不确定性传播框架。我们的框架首先通过直接建模和共形预测来量化COD的不确定性,并将这些不确定性信息传播到运动预测和关联步骤中。MOT-CUP旨在与不同的协作对象检测器和基线MOT算法合作。我们在V2X-SIM上评估了MOT-CUP,这是一个全面的协作感知数据集,并证明了准确性和2的提高2%。67倍不确定性的降低,例如排序和字节式。在以高阻塞水平为特征的情况下,我们的Mot-Cup表现出4.01%的提高ininaccuracy.mot-cupdemonstheimportheimportsheimportal cod和Mot中不确定性量化的持续性,并提供了基于不确定的Mot的准确性和降低基于Mot的预定率的尝试,并提供了第一个尝试。
与保形不确定性传播的协作多对象跟踪
主要关键词



相关文件推荐