机构名称:
¥ 1.0
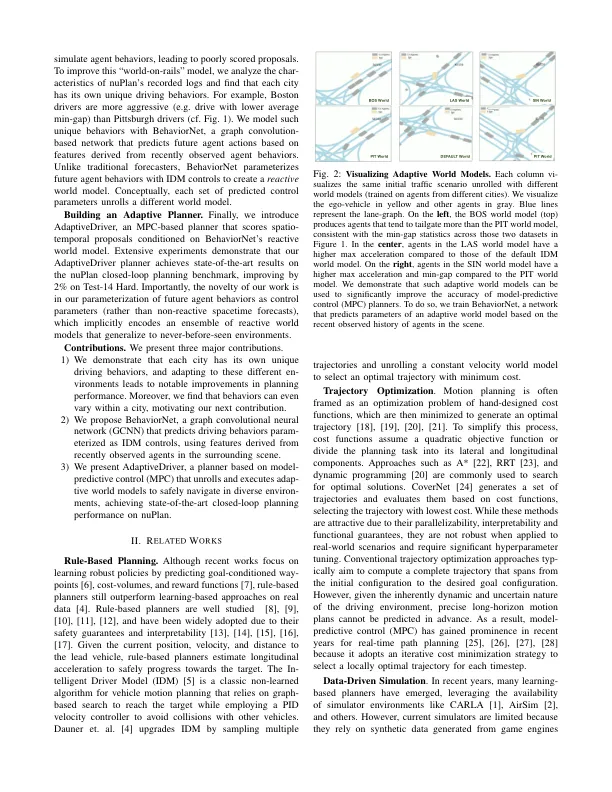
摘要 - 运动计划对于复杂的城市环境中的安全导航至关重要。从历史上看,运动策划者(MPS)已通过像卡拉这样的程序生成的模拟者进行了评估。但是,这种综合基准不会捕获现实世界的多代理相互作用。最近发布的MP基准标准 NUPLAN通过使用闭环仿真逻辑来增强现实世界驱动日志来解决此限制,从而有效地将固定的数据集变成了反应性模拟器。 我们分析了Nuplan记录的日志的特征,并发现每个城市都有其独特的驾驶行为,这表明健壮的计划者必须适应不同的环境。 我们学会用行为者(GravieNet)模拟这种独特的行为,该行为是一种图形卷积神经网络(GCNN),该卷积神经网络(GCNN)使用来自最近观察到的试剂历史的特征来预测反应性剂行为;从直觉上讲,一些侵略性的特工可能会导致铅车辆,而另一些则可能不会。 为了建模这种现象,cavenyet预测了代理运动控制器的参数,而不是直接预测其时空轨迹(就像大多数预报符一样)。 最后,我们提出了基于模型预测控制(MPC)计划者的AdapTivedRiver,该计划者展开了以行为网的预测为条件的不同世界模型。 我们的广泛实验表明,AdaptivedRiver在NUPLAN闭环计划基准上取得了最先进的结果,在14个硬式R-CLS上对先前的工作提高了2%,即使对从未见过的城市进行评估时也可以概括。NUPLAN通过使用闭环仿真逻辑来增强现实世界驱动日志来解决此限制,从而有效地将固定的数据集变成了反应性模拟器。我们分析了Nuplan记录的日志的特征,并发现每个城市都有其独特的驾驶行为,这表明健壮的计划者必须适应不同的环境。我们学会用行为者(GravieNet)模拟这种独特的行为,该行为是一种图形卷积神经网络(GCNN),该卷积神经网络(GCNN)使用来自最近观察到的试剂历史的特征来预测反应性剂行为;从直觉上讲,一些侵略性的特工可能会导致铅车辆,而另一些则可能不会。为了建模这种现象,cavenyet预测了代理运动控制器的参数,而不是直接预测其时空轨迹(就像大多数预报符一样)。最后,我们提出了基于模型预测控制(MPC)计划者的AdapTivedRiver,该计划者展开了以行为网的预测为条件的不同世界模型。我们的广泛实验表明,AdaptivedRiver在NUPLAN闭环计划基准上取得了最先进的结果,在14个硬式R-CLS上对先前的工作提高了2%,即使对从未见过的城市进行评估时也可以概括。
与自动驾驶自适应世界模型进行计划
主要关键词



相关文件推荐