机构名称:
¥ 1.0
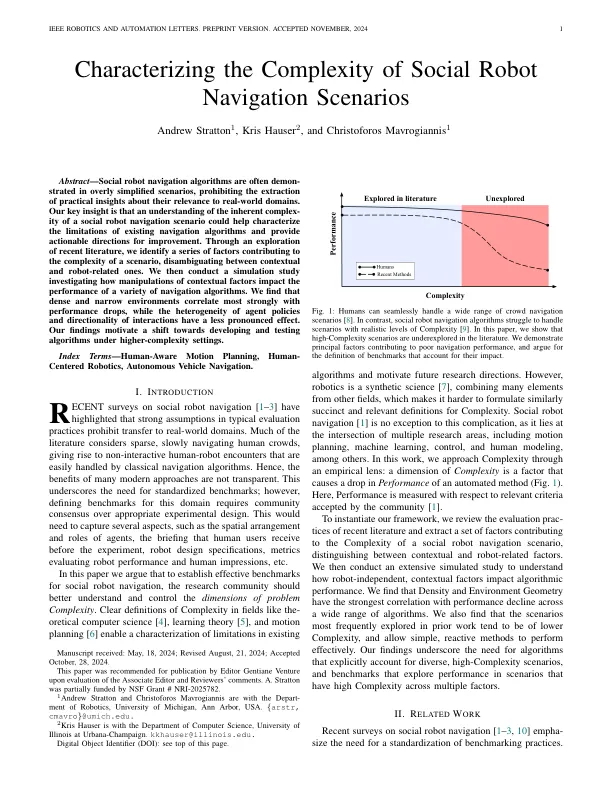
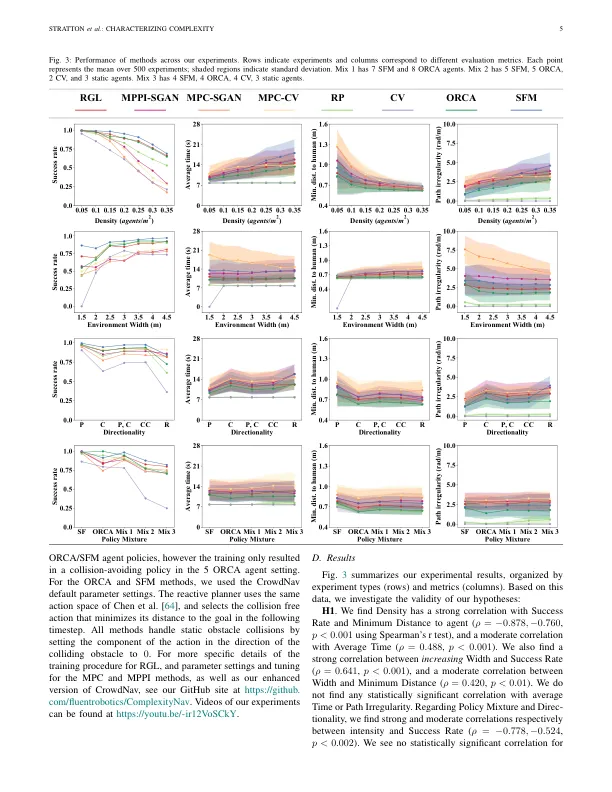
摘要 - 社会机器人导航算法通常在过度简化的场景中进行策划,禁止提取有关其与现实领域相关的实用见解。我们的主要见解是,了解社会机器人导航方案的固有复合物可以帮助表征现有导航算法的局限性,并提供可行的方向以进行改进。通过探索最近的文献,我们确定了一系列有助于方案复杂性的因素,在上下文和机器人相关的因素之间消除了歧义。然后,我们进行了一项模拟研究,研究了对上下文因素的操纵如何影响各种导航算法的性能。我们发现,密集和狭窄的环境与性能下降最密切相关,而代理策略的异质性和相互作用的方向性的效果不太明显。我们的发现激发了在更高复杂性设置下发展和测试算法的转变。
表征社交机器人导航方案的复杂性
主要关键词



相关文件推荐