
机构名称:
¥ 1.0
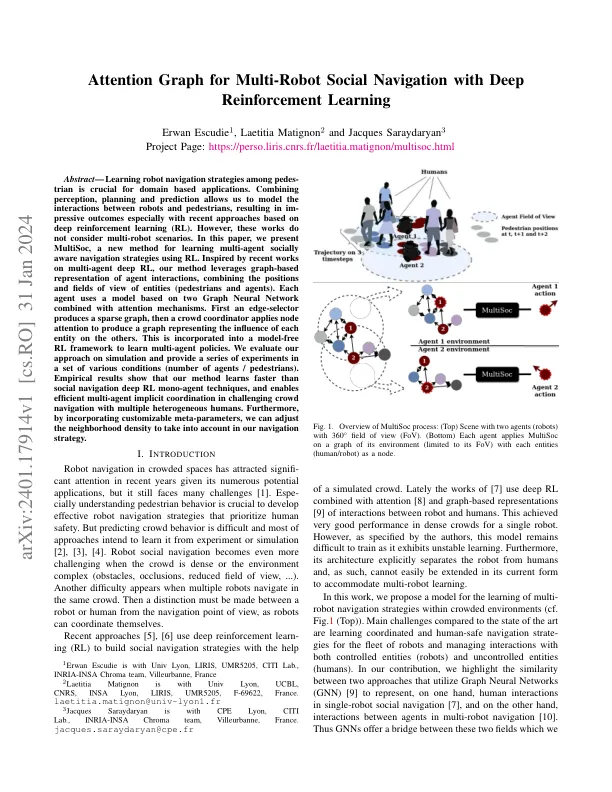
摘要 - 学习机器人导航策略 - 三角形对于基于域的应用至关重要。结合感知,计划和预测使我们能够对机器人和行人之间的相互作用进行建模,从而导致不断的结果,尤其是基于深度强化学习(RL)的最新方法。但是,这些作品不考虑多机器人方案。在本文中,我们提出了MultiSoc,这是一种使用RL学习多代理社会意识的导航策略的新方法。受到有关多代理深度RL的最新作品的启发,我们的方法利用了基于图形的代理相互作用的表示,结合了实体(行人和代理人)的位置和视野。每个代理使用基于两个图神经网络和注意机制的模型。首先,边缘se子产生一个稀疏的图,然后一个人群坐标应用了节点注意,以产生代表每个实体对其他实体的影响的图。这被整合到一个无模型的RL框架中,以学习多代理策略。我们评估了我们的模拟方法,并在各种条件(代理 /行人的数量)中提供了一系列实验。经验结果表明,我们的方法比社会导航更快地学习了深度RL单一代理技术,并且可以在挑战人群导航中通过多个异构人类进行有效的多代理隐式协调。此外,通过合并可自定义的元参数,我们可以调整邻里密度以考虑到我们的导航策略。
多机器人社交导航的注意图
主要关键词


相关文件推荐





























