机构名称:
¥ 1.0
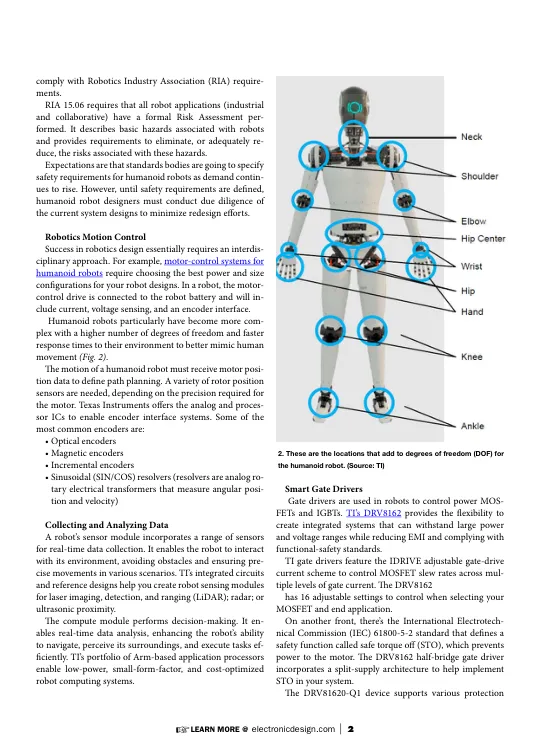
机器人运动控制成功的机器人运动控制成功基本上需要相互构图。例如,用于人形机器人的电机控制系统需要为您的机器人设计选择最佳的功率和尺寸配置。在机器人中,电动机控制驱动器连接到机器人电池,并包括电流,电压传感和编码器接口。人形机器人尤其与更高的自由度和更快的响应时间变得更加复杂,以更好地模仿人类运动(图2)。人形机器人的运动必须接收运动位置数据以定义路径计划。需要各种转子位置传感器,具体取决于电动机所需的精度。Texas Instruments提供了模拟和过程来启用编码器接口系统。一些最常见的编码器是:•光学编码器•磁编码器•增量编码器•正弦(SIN/COS)解析器(解析器是模拟的电气变压器,测量角姿势和速度)
如何创建较小,更安全和可扩展的机器人设计
主要关键词

相关文件推荐