机构名称:
¥ 1.0
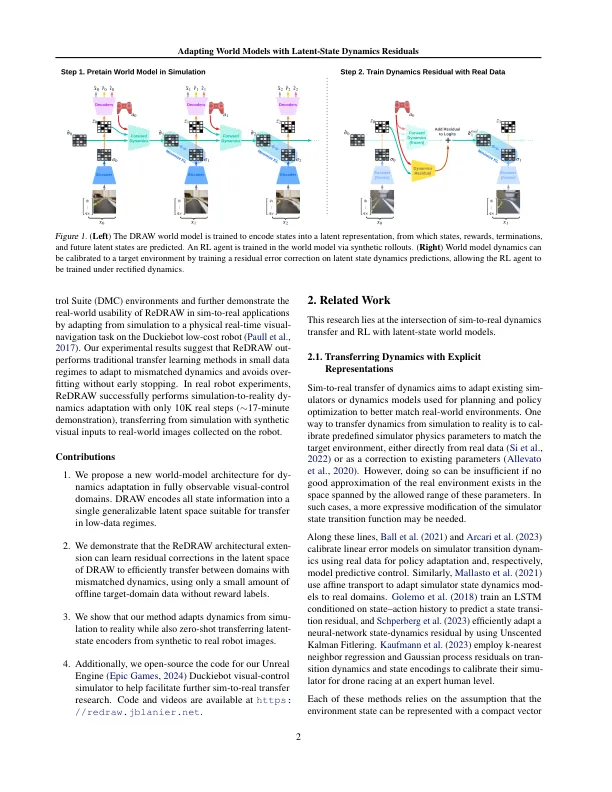
模拟对真实性增强学习(RL)面临着核对模拟和现实世界中的差异的关键挑战,这可能会严重降级剂。一种有希望的方法涉及学习校正以代表残留误差函数的模拟器正向动力学,但是对于高维状态(例如图像),此操作是不切实际的。为了克服这一点,我们提出了Redraw,这是一种潜在的自回归世界模型,在模拟中鉴定在模拟中,并通过剩余的潜在动力学而不是明确观察到的状态对目标环境进行了验证。使用此改编的世界模型,Redraw使RL代理可以通过校正动力学下的想象的推出来优化RL代理,然后在现实世界中部署。在多个基于视觉的Mujoco域和一个物理机器人视线跟踪任务中,重新绘制有效地对动态变化,并避免在传统转移方法失败的低数据方案中过度拟合。
与潜在的动力学残差适应世界模型
主要关键词




相关文件推荐