机构名称:
¥ 1.0
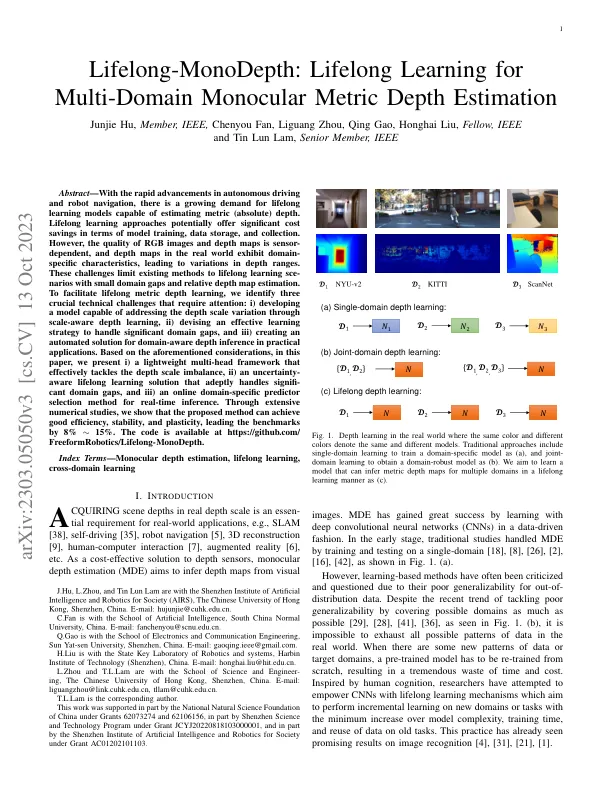
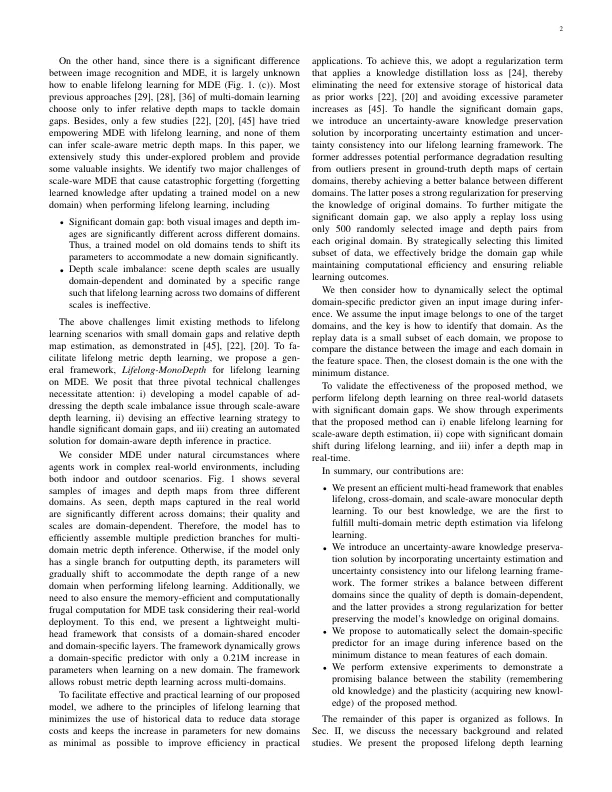
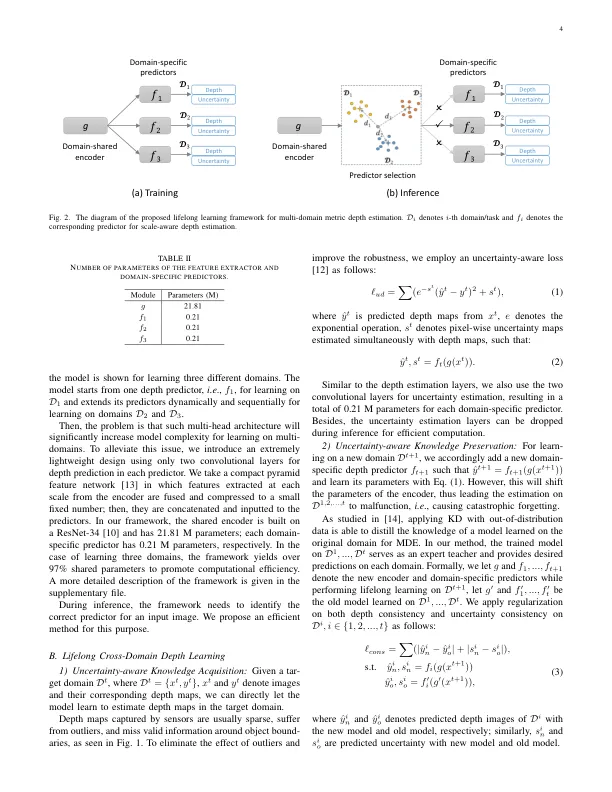
摘要 - 随着自动驾驶和机器人导航的快速进步,对能够估计度量(绝对)深度的终身学习模型的需求不断增长。终身学习方法可能在模型培训,数据存储和收集方面可以节省大量成本。但是,RGB图像和深度图的质量是传感器的,现实世界中的深度图具有特定的特定特征,从而导致深度范围的变化。这些挑战将现有方法限制为具有较小的域差距和相对深度图估计的终身学习。为了促进终生的度量深度学习,我们确定了需要注意的三个至关重要的技术挑战:i)开发一个能够通过尺度感知的深度学习来解决深度尺度变化的模型,ii)设计有效的学习策略来处理明显的域间隙,iii III)为在实践应用中创建一个自动化的解决方案。基于上述考虑因素,在本文中,我们提出了一个轻巧的多头框架,有效地解决了深度尺度的不平衡,ii)一种不确定性的意识到的终身学习解决方案,可熟练处理重要的域域,iii)一种在线域特异性预测方法,以实现实时的预测方法。通过广泛的数值研究,我们表明该方法可以实现良好的效率,稳定性和可塑性,从而使基准测试幅度约为15%。该代码可在https://github.com/ freeformrobotics/lifelong-monodepth上找到。
终身单调:多域单眼深度估计的终身学习
主要关键词


相关文件推荐