机构名称:
¥ 2.0
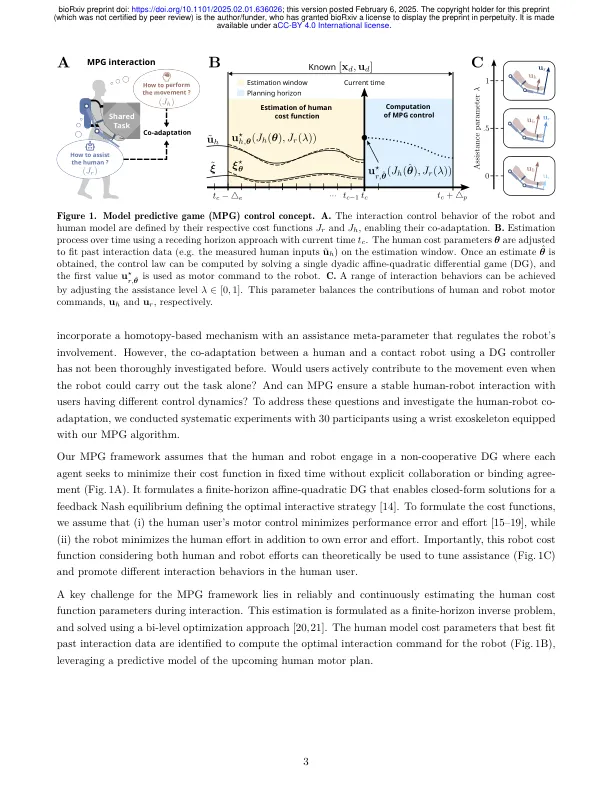
越来越多地使用联系机器人来帮助人类进行体育锻炼和制造任务。但是,当前系统的有效性受到限制,因为它们的控制着重于系统,而无需明确考虑即将到来的人类用户的控制。在这里,我们提出了一个基于游戏的基于游戏的控制器,用于接触机器人,该控制器通过在移动期间预测其固有有限的计划Hori-Zon,确保与人用户的最佳互动。使用此模型可预测性游戏(MPG)控制器,我们在实验中系统地研究了人类机器人共同适应,表明:(a)与MPG的相互作用对所有参与者的互动保持稳定,同时有效地减少了人类的努力; (b)机器人适应人类行为,识别和表征随着时间的推移一致的单个运动控制策略,并且可以用作控制生物标志物; (c)人类适应机器人的行为,并且可以通过辅助元参数调节其相互作用行为。这些发现表明,人类可以在运动过程中理解并适应伴侣的控制策略,从而表现出与游戏理论原则一致的行为。此外,援助元参数指导人类用户达到特定相互作用行为的能力可用于开发用于体育锻炼和康复的多功能机器人辅助学习系统。
个性化和有针对性的互动援助的模型预测游戏控制
主要关键词




相关文件推荐