机构名称:
¥ 1.0
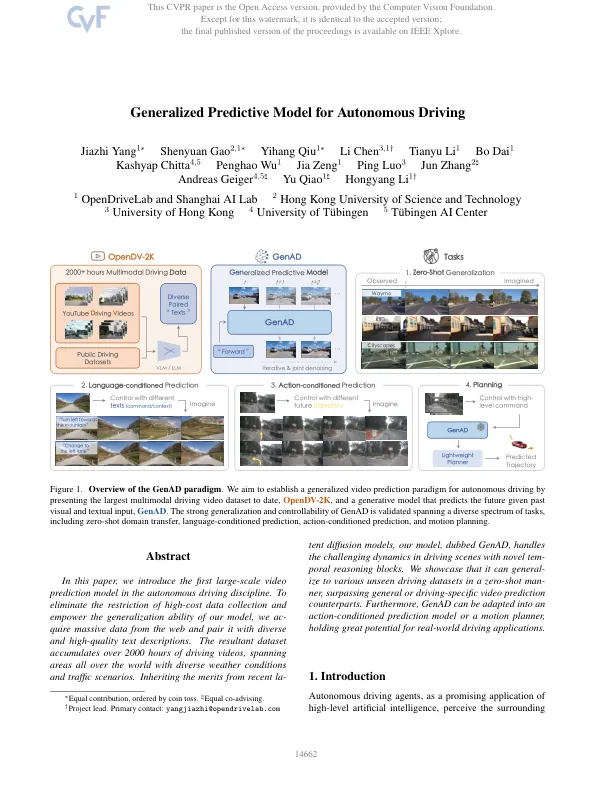
环境,建立内部世界模型表示,做出决策并采取措施[9,50]。,尽管数十年来在学术界和工业上做出了巨大的努力,但他们的部署仍限于某些杂物或场景,并且不能在世界上无缝地应用。一个关键原因是在结构化自主驾驶系统中学习模型的概括能力有限。通常,感知模型会面临概括到不同环境的挑战,随着地理位置,传感器配置,天气条件,开放式对象等的变化。;预测和计划模型无法推广到具有罕见的sce narios和不同驾驶意图的非确定性期货[2,16,54]。是由人类学习如何感知和刺激世界的动机[27,28,49],我们主张采用驾驶视频作为通用界面,将其推广到具有动态期货的各种环境。基于此,首选驱动视频预测模型以完全捕获有关驾驶场景的世界知识(图1)。通过预测未来,视频预测因子本质上了解了自主驾驶的两个重要方面:世界如何运作以及如何在野外安全地操纵。最近,社区已开始采用视频作为代表各种机器人任务的观察行为和行动的接口[11]。对于诸如经典视频预测和机器人技术等领域,视频背景大多是静态的,机器人的运动很慢,并且视频的分解很低。相比之下,对于驾驶场景 - iOS,它与室外环境高度斗争,代理人涵盖了更大的动作,以及涵盖众多视图的感觉分辨率。这些区别导致了自主驾驶应用的重大挑战。幸运的是,在驾驶领域中开发视频预测模型[4、15、19、23、23、25、33、38、45、47]。尽管在预测质量方面取得了令人鼓舞的进展,但这些尝试并未像经典的机器人任务(例如,操作)那样实现概括能力,仅限于有限的场景,例如流量密度低[4]的高速公路[4]和小型数据集[15,23,33,33,33,45,45,47],或者在环境方面进行不同的条件,以使38个条件(33,45,47)的差异(33,45,47),以使3个条件(33,45,47)的差异(33,45,47),以使3个条件(33,45,47)的差异[3](33,45,47),以下情况下的情况[3](33,33,45,47),这是3次差异。如何揭示视频预测模型的驾驶潜力仍然很少探索。以上面的讨论为动机,我们旨在构建一个自动驾驶的视频预测模型,能够概括为新的条件和环境。为此,我们必须回答以下问题:(1)可以以可行且可扩展的方式获得哪些数据?(2)我们如何制定一个预测模型来捕获动态场景的复杂演化?(3)我们如何将(基础)模型应用于下游任务?
自主驾驶的广义预测模型
主要关键词


相关文件推荐