机构名称:
¥ 1.0
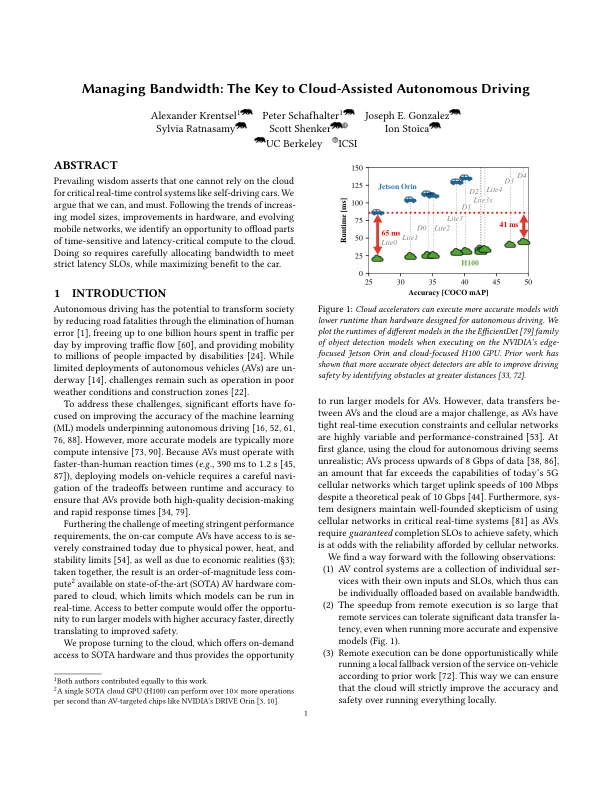
1引言自动驾驶通过消除人为错误[1]来减少道路死亡[1],通过改善交通流量[60]并为数百万受残疾人影响的人提供流动性来改变社会的潜力[1]。虽然自动驾驶汽车的部署有限(AVS)是无限的[14],但仍存在挑战,例如在较差的天气条件和建筑区域中运营[22]。为了应对这些挑战,为提高机器学习的准确性(ML)模型而采取了重大努力[16,52,61,76,88]。但是,更准确的模型通常更加算法[73,90]。因为AV必须以比人类的反应时间快(例如390毫秒至1。2 s [45,87]),在车辆上部署模型需要仔细的运行时和准确性之间的权衡导航,以确保AVS提供高质量的决策和快速响应时间[34,79]。进一步满足严格的绩效要求的挑战,由于体力,热量和稳定性限制以及由于经济现实而导致的车载计算AV可以访问今天受到限制(第3节);综上所述,结果是在最新的(SOTA)AV硬件上可用的量命令较少,可用于云,该硬件可以实时运行哪些模型。访问更好的计算将为更快地运行更高精度的更大型号提供机会,直接转化为提高安全性。我们建议转向云,该云提供对SOTA硬件的按需访问,因此提供了机会
云辅助自主驾驶的钥匙
主要关键词


相关文件推荐