机构名称:
¥ 1.0
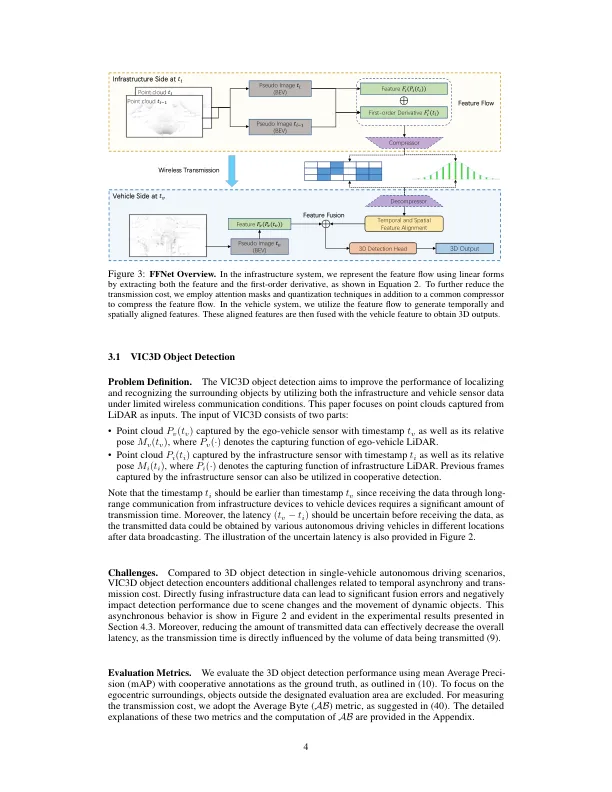
合作利用自动车辆和基础设施传感器数据可以显着增强自主驾驶感知能力。但是,不确定的时间异步和有限的通信条件会导致融合未对准并限制基础架构数据的利用。为了解决车辆基础结构合作3D(VIC3D)对象检测中的这些问题,我们提出了一个新型的合作检测框架(FFNET)。ffnet是一个基于流动的特征融合框架,它使用特征流预测模块来预测未来的特征并补偿异步。而不是从静止图像提取的特征图,而是利用顺序基础架构帧的时间连贯性。此外,我们引入了一种自我监督的训练方法,该方法使FFNET能够从原始基础架构序列中生成特征流,并具有特征预测能力。示例结果表明,我们所提出的方法的表现优于现有的合作检测方法,而仅需要约1/100的原始数据传输成本,并且在DAIR-V2X数据集中涵盖了一个模型中的所有延迟。代码可在https://github.com/haibao-yu/ffnet-vic3d上找到。
用于车辆基础结构合作3D对象检测的基于流动的特征融合
主要关键词



相关文件推荐