机构名称:
¥ 2.0
摘要:我们开发了一个用于正面自主赛车的分层控制器。我们首先引入了具有现实安全和公平规则的赛车游戏的表述。高级计划者将原始公式近似为具有简化状态,控制和动态的离散游戏,以轻松编码复杂的安全性和公平性规则并计算一系列目标路点。低级控制器将产生的路点作为参考轨迹,并通过使用简单的目标和约束来求解替代近似公式来计算高分辨率控制输入。我们考虑了低级计划者的两种方法,它们构建了两个分层控制器。一种方法使用多代理增强学习(MARL),另一种方法求解线性季度NASH游戏(LQNG)来产生控制输入。将控制器与三个基线进行比较:端到端MARL控制器,跟踪固定赛车线的MARL控制器以及跟踪固定赛车线的LQNG控制器。定量结果表明,所提出的层次结构方法优于其各自的基线方法,而在头部竞赛中获胜和遵守规则。使用MARL进行低级控制的分层控制器通过赢得超过90%的头对头种族并更始终如一地遵守复杂的赛车规则,从而超过了所有其他方法。定性地,我们观察到的拟议的控制器模仿了专家驾驶员所采取的措施,例如屏蔽/阻塞,超车和长期计划,以延迟优势。我们表明,即使受到复杂的规则和约束挑战,游戏理论推理的层次结构计划也会产生竞争行为。
正面自主赛车的分层控制
主要关键词
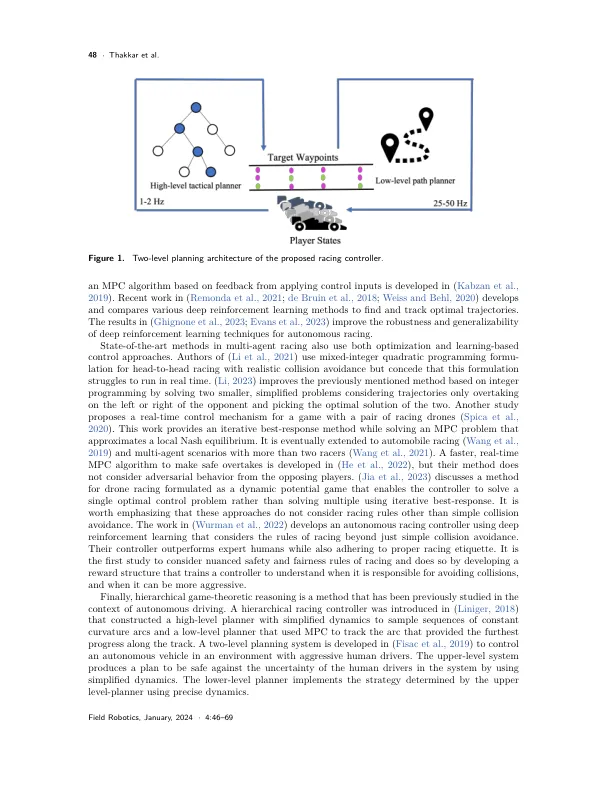


相关文件推荐