机构名称:
¥ 1.0
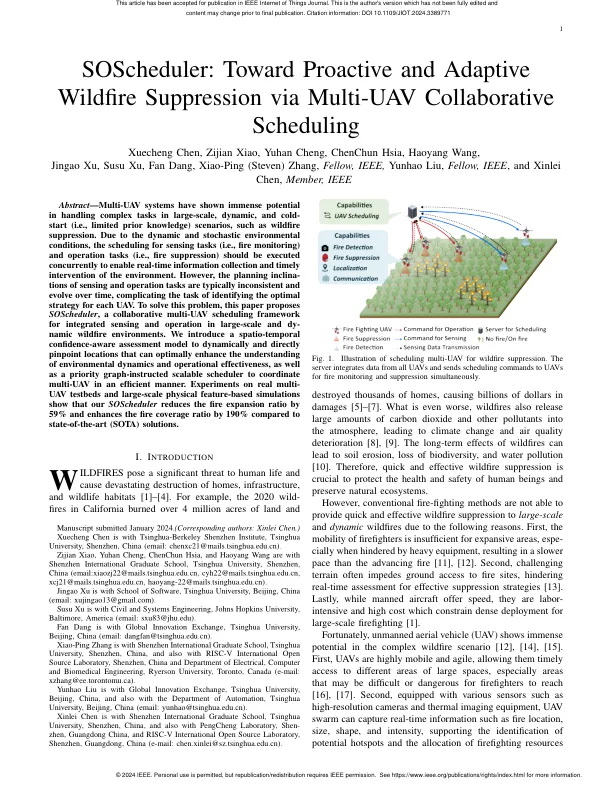
摘要-Multi-UAV系统在处理大规模,动态和冷启动(即有限的先验知识)场景(例如野火抑制)中的复杂任务方面已经显示出巨大的潜力。由于动态和随机的环境条件,应同时执行感应任务(即火灾监控)和操作任务(即抑制火灾)的时间表,以实现实时信息收集和及时干预环境。但是,感应和操作任务的计划包含通常是不一致的,并且随着时间的流逝而发展,这使确定每个无人机的最佳策略的任务变得复杂。为了解决这个问题,本文提出了Soscheduler,这是一个合作的多UAV调度框架,用于在大规模和Dynamic Wildfire环境中进行集成感应和操作。我们引入了一个时空的置信度感知评估模型,直接和直接查明位置,这些位置可以最佳地增强对环境动力学和操作有效性的理解,以及优先的图形结构可扩展调度程序,以高效的方式协调多-UAV。对实际多uav测试床和大规模物理特征模拟的实验表明,与最新的(SOTA)解决方案相比,我们的Soscheduler将火灾膨胀率降低了59%,并将火灾覆盖率提高了190%。
soscheduler -fan dang
主要关键词



相关文件推荐