机构名称:
¥ 1.0
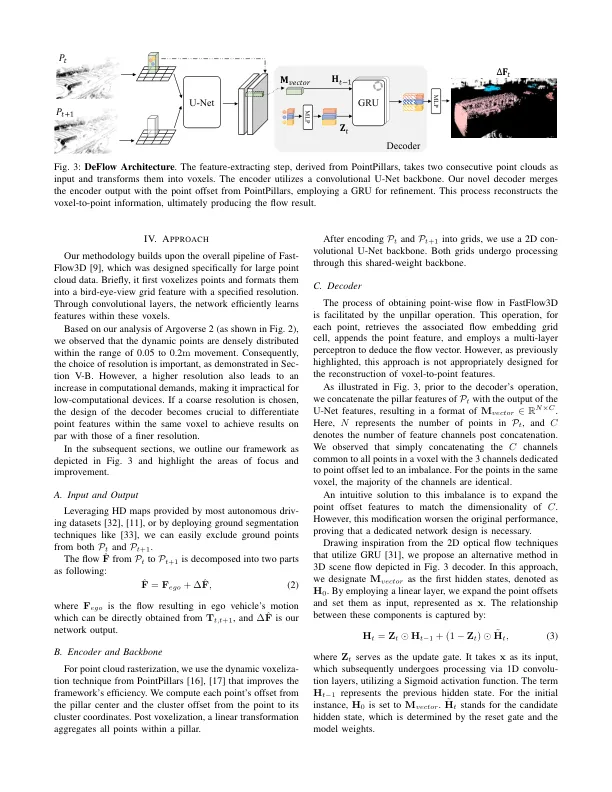
摘要 - 场景流估计通过预测场景中的点运动来确定场景的3D运动场,尤其是在自主驾驶中的帮助任务时。许多具有大规模点云的网络作为输入使用Voxelization来创建用于实时运行的伪图像。但是,体素化过程通常会导致特定点特征的丧失。这引起了为场景流任务恢复这些功能的挑战。我们的论文引入了Deflow,该文件可以从基于体素的特征过渡到使用门控复发单元(GRU)改进的点特征。为了进一步增强场景流量估计的性能,我们制定了一种新颖的损失函数,以解释静态点和动态点之间的数据不平衡。对Argoverse 2场景流量任务的评估表明,Deflow在大规模点云数据上取得了最新的结果,表明我们的网络与其他网络相比具有更好的性能和效率。该代码在https://github.com/kth-rpl/deflow上进行开源。
自主驾驶中场景流网络的解码器
主要关键词



相关文件推荐