机构名称:
¥ 1.0
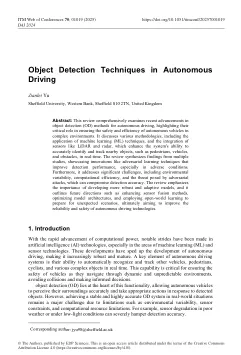
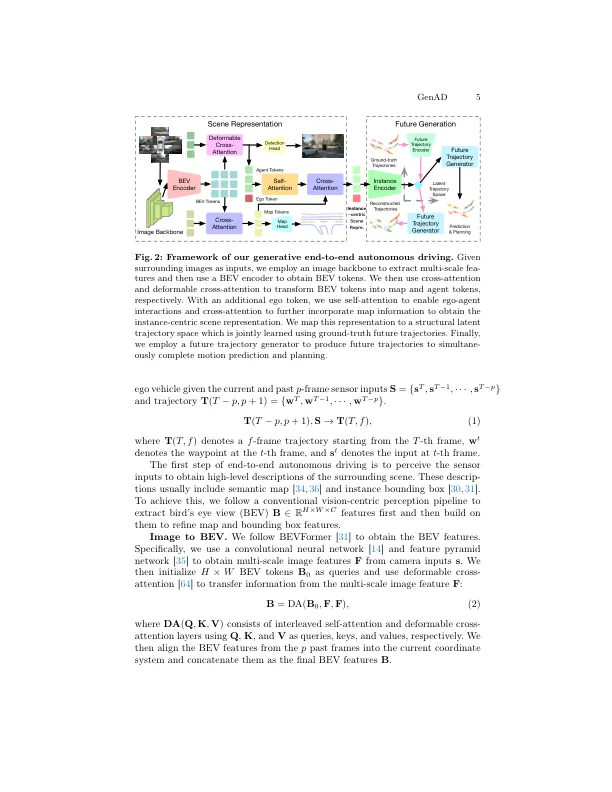
摘要。直接产生原始传感器的计划结果一直是长期以来的自动驾驶解决方案,最近引起了人们的关注。大多数现有的端到端自主驾驶方法将此问题分解为感知,运动预测和计划。但是,我们认为传统的渐进式管道仍然无法全面地对整个流量演化过程进行建模,例如,自我汽车与其他交通量之间的未来相互作用以及事先的结构轨迹。在本文中,我们探索了一种新的端到端自动驾驶范式,其中关键是预测自我汽车和周围环境如何发展给给定的场景。我们提出了Genad,这是一种生成框架,将自主驱动式驱动为生成的建模问题。我们提出了一个以实例为中心的场景令牌,它首先将周围的场景转换为地图意识到的实例令牌。然后,我们采用差异自动编码器来学习结构潜在空间中的未来轨迹分布,以进行先验建模。我们进一步采用时间模型来捕获潜在空间中的代理和自我运动,以生成更有效的未来轨迹。genad最终同时通过在实例令牌的条件下并使用学习的时间模型来生成期货的学习结构潜在空间中的采样分布来同时执行运动前词和计划。在广泛使用的Nuscenes基准上进行的广泛实验表明,拟议的Genad在以高效率上实现了以视觉为中心的端到端自动驾驶的状态表现。代码:https://github.com/wzzheng/genad。
genad:生成端到端的自主驾驶
主要关键词



相关文件推荐