机构名称:
¥ 1.0
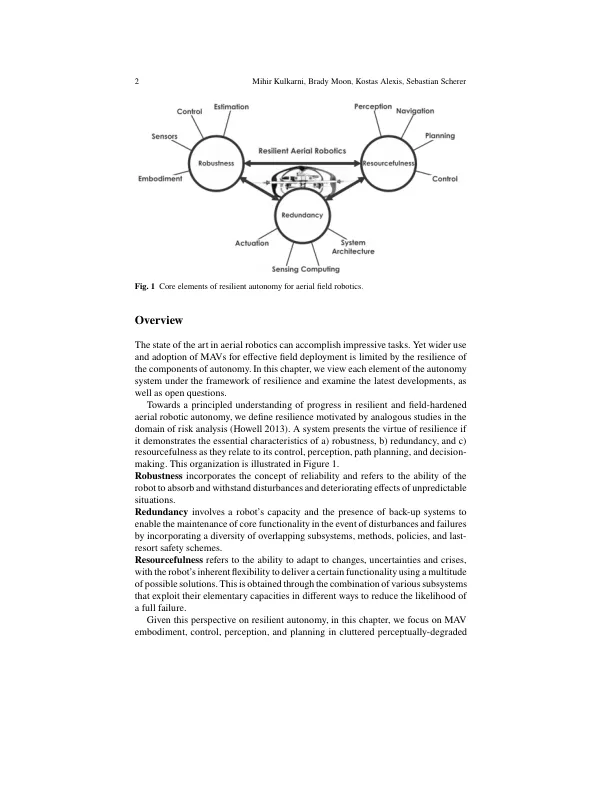
最先进的空中机器人技术可以完成令人印象深刻的任务。然而,微型飞行器 (MAV) 在有效野外部署中的更广泛使用和采用受到自主组件弹性限制。在本章中,我们将在弹性框架下审视自主系统的每个要素,并研究最新发展和悬而未决的问题。为了从原则上理解弹性和实地强化的空中机器人自主技术的进展,我们受风险分析领域类似研究的启发定义了弹性(Howell 2013)。如果一个系统展现出与其控制、感知、路径规划和决策相关的基本特征 a) 鲁棒性、b) 冗余性和 c) 足智多谋性,则该系统具有弹性的优点。该组织如图 1 所示。鲁棒性融合了可靠性的概念,指的是机器人吸收和承受不可预测情况的干扰和恶化影响的能力。冗余性涉及机器人的能力和备用系统的存在,通过整合各种重叠的子系统、方法、策略和最终安全方案,确保在发生干扰和故障时能够维持核心功能。机智性是指适应变化、不确定性和危机的能力,并利用机器人固有的灵活性,使用多种可能的解决方案来实现特定功能。这是通过组合各种子系统来实现的,这些子系统以不同的方式利用其基本能力来降低完全故障的可能性。鉴于这种关于弹性自主性的视角,在本章中,我们将重点关注MAV在混乱、感知退化的环境中的实施、控制、感知和规划。
空中领域机器人
主要关键词




相关文件推荐