机构名称:
¥ 1.0
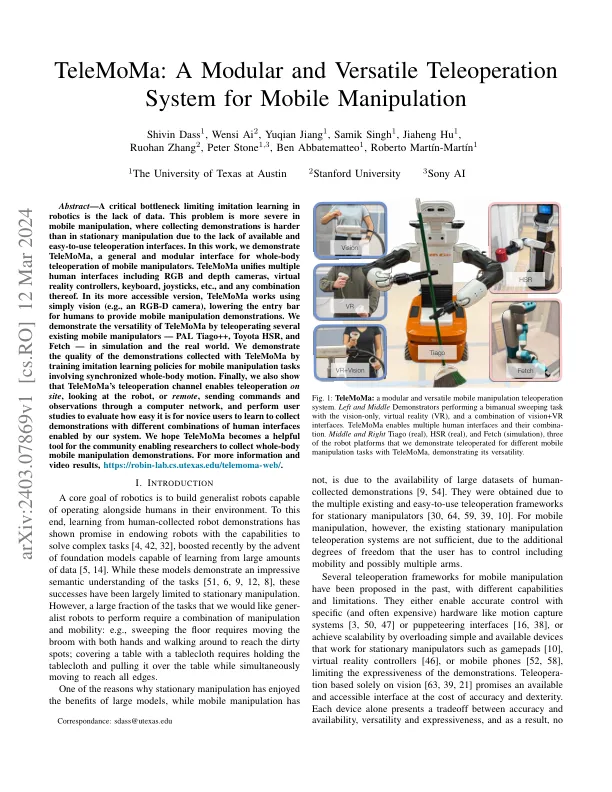
摘要 - 在机器人技术中限制模仿学习的关键瓶颈是缺乏数据。在移动操作中,此问题更为严重,由于缺乏可用且易于使用的远程操作界面,收集演示比固定操作更难。在这项工作中,我们演示了Telemoma,这是一种通用和模块化的移动操纵器近亲界面的界面。Telemoma统一了多个人类界面,包括RGB和深度摄像机,虚拟现实控制器,键盘,操纵杆等,以及其任何组合。在其更容易访问的版本中,Telemoma使用Simply Vision(例如RGB-D摄像头)进行了作品,从而降低了人类提供移动操作演示的入口栏。我们通过在模拟和现实世界中详细介绍了几个现有的移动操纵器(Pal Tiago ++,Toyota HSR和Fetch)来证明远程信息瘤的多功能性。我们通过训练模仿学习政策,用于涉及同步全身运动的移动操纵任务,证明了用远程瘤收集的示范质量。最后,我们还表明,Telemoma的Teleperation Channel可以在现场进行远程操作,查看机器人或遥控器,通过计算机网络发送命令和观察,并进行用户研究以评估新手用户学习与我们系统启用人类接口组合的不同组合的新手用户的容易。我们希望电视瘤成为社区使研究人员能够收集全身移动操作演示的有用工具。有关更多信息和视频结果,https://robin-lab.cs.utexas.edu/telemoma-web/。
远程瘤:一种用于移动操纵的模块化和通用的远程操作系统
主要关键词

相关文件推荐