机构名称:
¥ 1.0
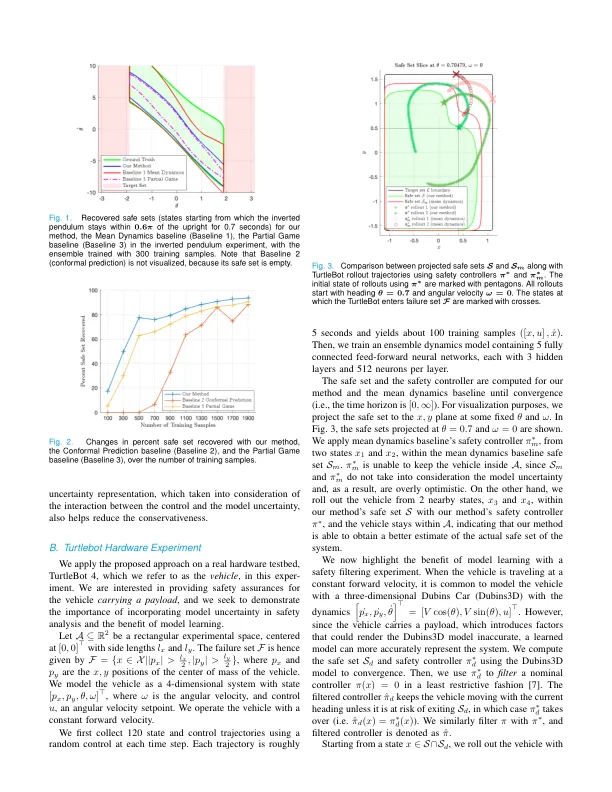
摘要 - 随着自主系统在我们的社会中变得越来越综合和积分,需要准确建模并安全地控制这些系统的需求已大大增加。在过去的十年中,使用深度学习技术来建模和控制系统很难使用第一原理建模。但是,为此类系统提供安全保证仍然很困难,部分原因是学习模型的不确定性。在这项工作中,我们旨在为不容易从第一原则衍生而来的系统提供安全保证,因此,使用深度学习技巧更加有助于学习。鉴于感兴趣的系统和安全限制系统,我们从数据中学习了系统动态的集合模型。利用集合不确定性作为学习动力学模型中不确定性的量度,我们计算了最大的鲁棒控制不变式集合,从该集合开始,该系统从该集合开始,从而确保系统满足实现模型不确定性的条件下的安全性约束,这些模型不确定性包含在预定的可允许模型集合中。我们证明了使用倒置的模拟案例研究的方法的有效性,并与Turtlebot进行了硬件实验。实验表明,我们的方法可鲁棒化系统对模型不确定性的控制作用,并在不过分限制的情况下产生安全行为。可以在项目网站1上找到代码和随附的视频。
为具有未知动态的系统提供安全保证
主要关键词




相关文件推荐








![[修订]安全交付系统反...](/simg/4/4e01df11ad80480179829aab87952de5f62935e0.webp)