机构名称:
¥ 1.0
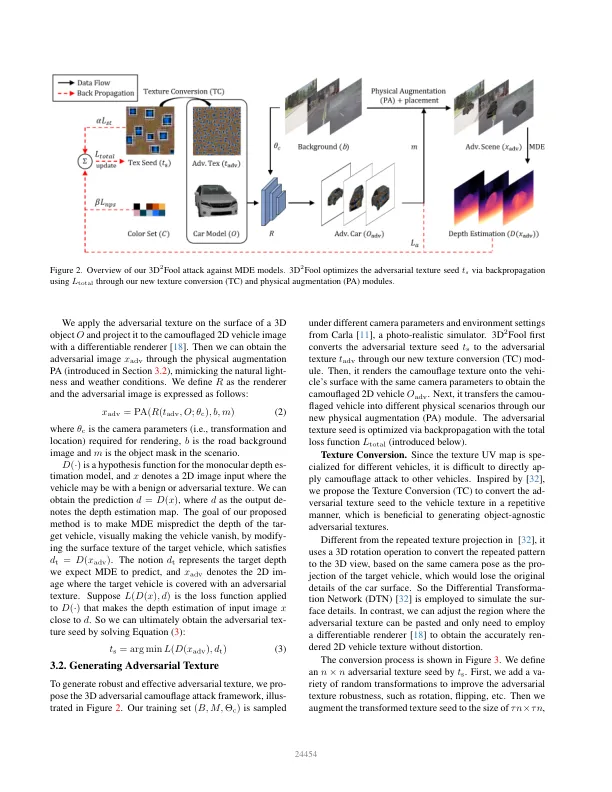
广泛应用于自主驾驶中的基于深度学习的单眼深度估计(MDE)很容易受到对抗性攻击的影响。先前针对MDE模型的物理攻击依赖于2D广泛的补丁,因此它们仅影响MDE地图中的一个小型局部区域,但在各种观点下都失败了。为了解决这些限制,我们提出了3D深度傻瓜(3d 2傻瓜),这是对MDE模型的第一个基于3D纹理的对抗性攻击。3d 2傻瓜被专门优化,以生成3D对抗纹理对型号的车辆类型,并在恶劣天气条件(例如雨水和雾)中具有改善的鲁棒性。实验结果验证了我们3d 2傻瓜在各种情况下的出色性能,包括车辆,MDE Mod-els,天气状况和观点。现实世界中使用打印3D纹理的实验实验进一步表明,我们的3d 2傻瓜可能会导致超过10米的MDE误差。该代码可在https://github.com/gandolfczjh/3d2fool上找到。
物理3D对抗攻击自动驾驶中的单眼深度估计
主要关键词




相关文件推荐