机构名称:
¥ 1.0
和投掷。[14]但是,由于收集和标记代表性交互数据集,广泛的优化和过度拟合的挑战,数据驱动的前向模型对于交互任务不合适。与未经检测环境相互作用的CSM的有希望的方法是连续机械模型。这些模型以物理术语表征了软机器人的变形,并用作物理相互作用的有价值的模拟器。经典的有限元方法可以准确代表复杂的3D几何形状。[15]这种准确性以高计算成本而使控制问题复杂化,尽管最近的模型订单减少技术使这些方法更实惠。[16,17]其他合适的方法采用了降低的机械模型,例如哥塞拉特杆,它们有效地描述了经历了大型专制的细长身体,平衡了复杂力学和计算效率的准确表示。
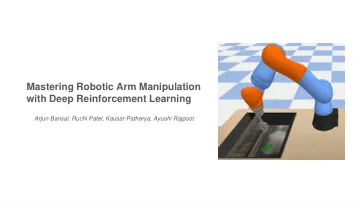
通过深钢筋学习用软机器人手臂推动
主要关键词


相关文件推荐