机构名称:
¥ 1.0
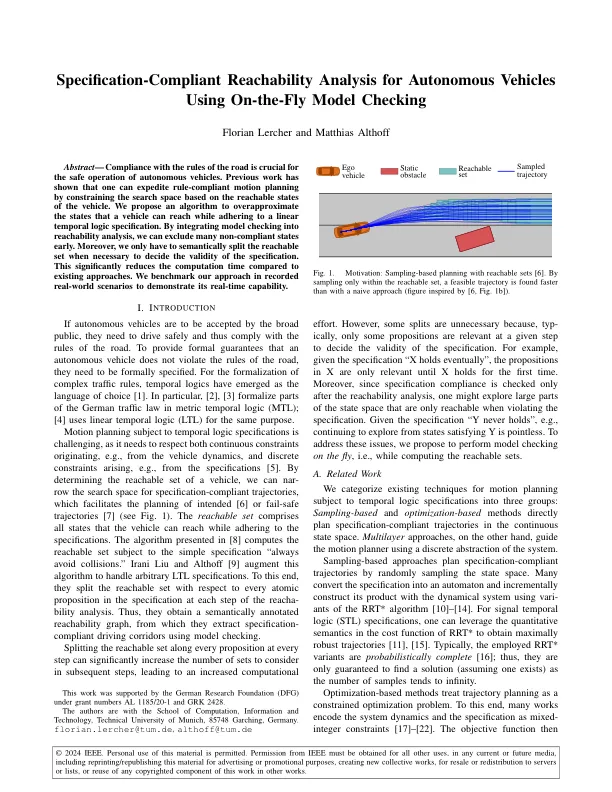
摘要 - 遵守道路规则对于自动驾驶汽车的安全操作至关重要。以前的工作表明,可以通过基于车辆可及的搜索空间来限制搜索空间来加快符合规则的运动计划。我们提出了一种算法,以使车辆在粘附在线性时间逻辑规范时可以达到的状态过度陈述。通过将模型检查整合到可及性分析中,我们可以尽早排除许多不合规的状态。我们只需要在必要时在语义上分配可及的集合,以决定规范的有效性。与现有方法相比,这大大减少了计算时间。我们在录制的现实世界情景中基准了我们的方法,以展示其实时功能。
眼镜蛇:机器人应用程序的可复合基准
主要关键词



相关文件推荐