机构名称:
¥ 1.0
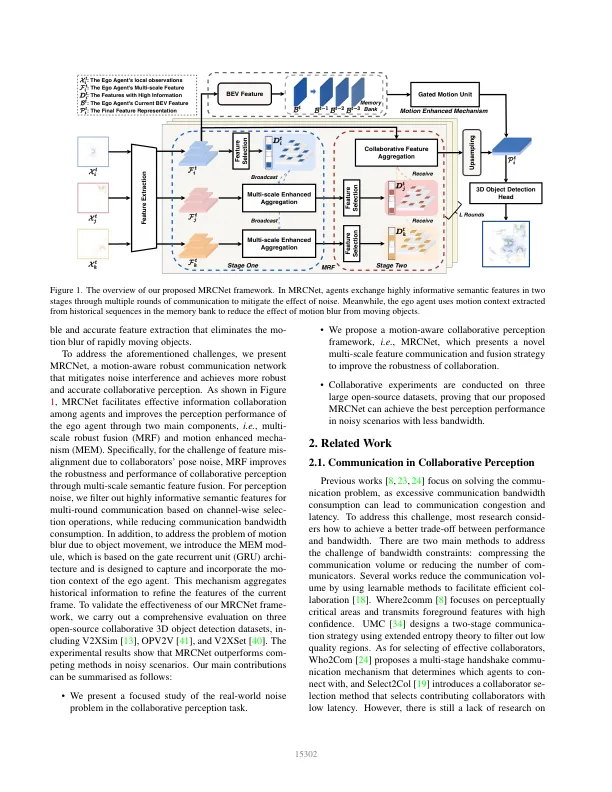
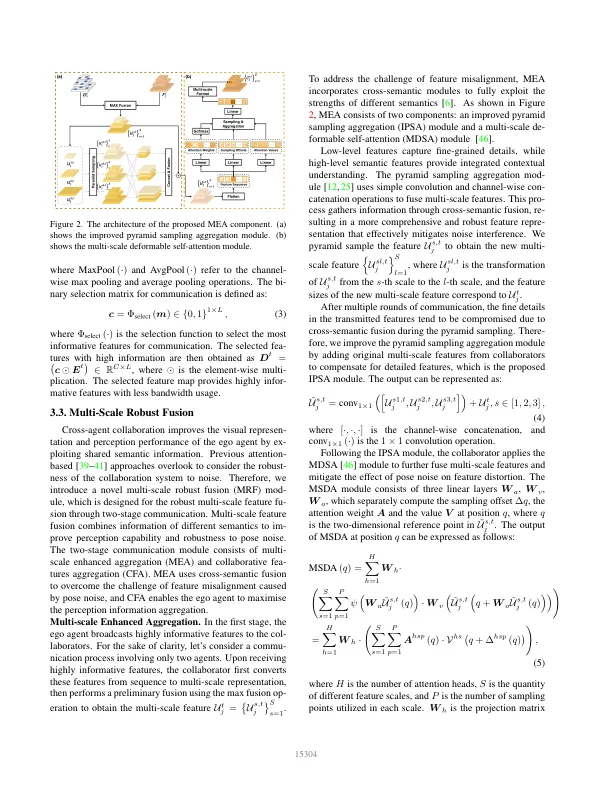
协作感知允许在多个代理(例如车辆和基础)之间共享信息,以通过交流和融合来获得对环境的全面看法。当前对多机构协作感知系统的研究通常会构成理想的沟通和感知环境,并忽略了现实世界噪声的效果,例如姿势噪声,运动模糊和感知噪声。为了解决这一差距,在本文中,我们提出了一种新颖的运动感知robus-Busban通信网络(MRCNET),可减轻噪声干扰,并实现准确且强大的协作感知。MRCNET由两个主要组成部分组成:多尺度稳健融合(MRF)通过驱动跨语义的多尺度增强的聚集到不同尺度的融合特征,而运动增强机制(MEM)捕获运动上下文,以补偿动作对物体引起的信息,从而解决了姿势噪声。对流行的协作3D对象检测数据集的实验结果表明,在噪声方案中,MRCNET优于使用较少的带宽感知性能的噪声方案。我们的代码将在https://github.com/indigochildren/collaborative-ception-mrcnet上进行重新释放。
通过运动吸引强大的通信网络
主要关键词



相关文件推荐