机构名称:
¥ 2.0
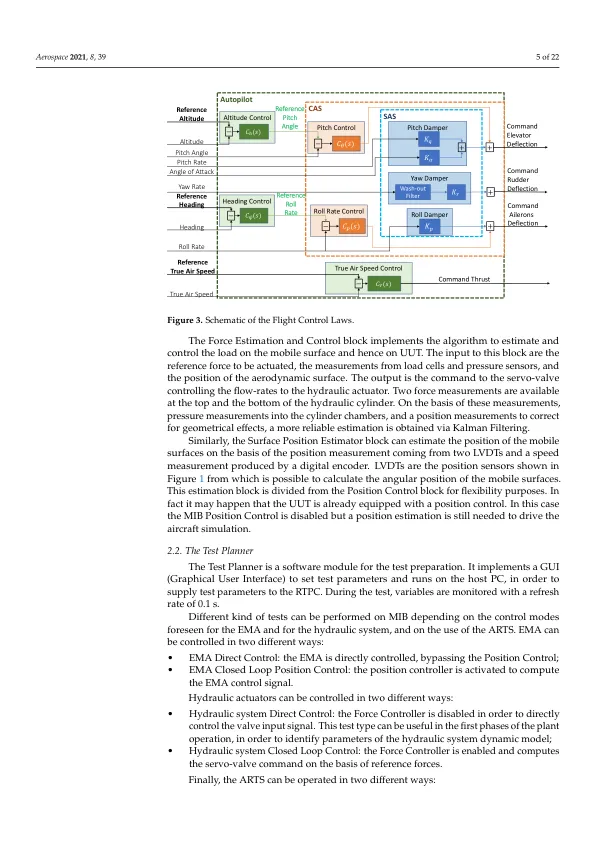
摘要:本文介绍了模块化铁鸟新概念的控制架构和控制规律,旨在重现飞行载荷,以测试中小型飞机和无人机的移动式气动控制面执行器。铁鸟控制系统必须保证反作用力的驱动。一方面,液压执行器模拟飞行过程中由于气动和惯性效应而作用于移动表面的铰链力矩;另一方面,待测试的执行器施加主动铰链力矩来控制同一表面的角位置。参考气动和惯性载荷由飞行模拟模块生成,以重现操作过程中出现的更真实的情况。控制动作的设计基于用于产生载荷的液压装置的动态模型。该系统使用比例积分微分控制算法进行控制,该算法通过优化算法进行调整,同时考虑了被测执行器的闭环动力学、受控装置的不确定性和干扰。通过数值模拟证明了所提出的架构和控制规律的有效性。
模块化铁鸟的建模与控制 - STM 存储库
主要关键词




相关文件推荐