
机构名称:
¥ 1.0
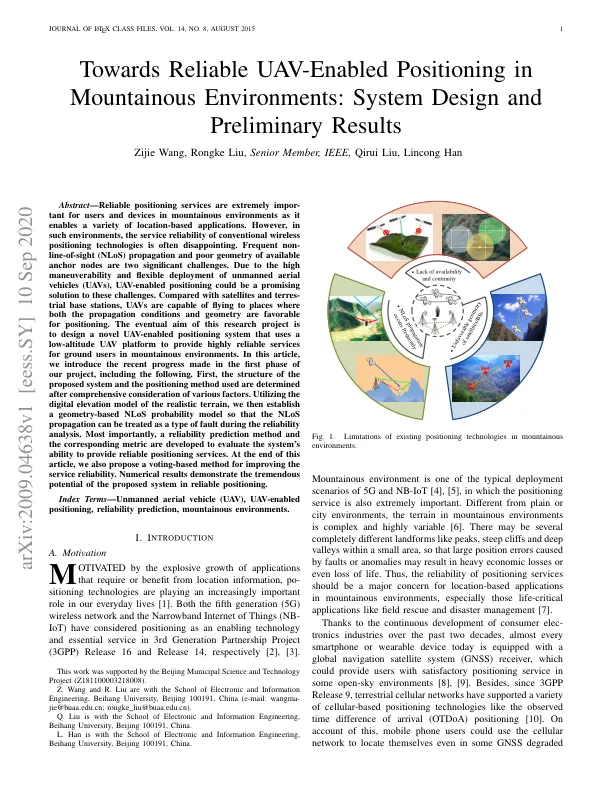
摘要 — 可靠的定位服务对于山区环境中的用户和设备极为重要,因为它可以实现各种基于位置的应用。然而,在这样的环境中,传统无线定位技术的服务可靠性往往令人失望。频繁的非视距 (NLoS) 传播和可用锚节点的不良几何形状是两个重大挑战。由于无人机 (UAV) 的高机动性和灵活部署,无人机定位可能是解决这些挑战的一个有希望的解决方案。与卫星和地面基站相比,无人机能够飞到传播条件和几何形状都有利于定位的地方。本研究项目的最终目标是设计一种新型的无人机定位系统,该系统使用低空无人机平台为山区环境中的地面用户提供高可靠性服务。在本文中,我们介绍了项目第一阶段的最新进展,包括以下内容。首先,在综合考虑各种因素后确定所提出的系统的结构和使用的定位方法。利用现实地形的数字高程模型,我们建立了基于几何的 NLoS 概率模型,以便在可靠性分析期间将 NLoS 传播视为一种故障。最重要的是,开发了一种可靠性预测方法和相应的指标来评估系统提供可靠定位服务的能力。在本文的最后,我们还提出了一种基于投票的方法来提高服务可靠性。数值结果证明了所提出的系统在可靠定位方面的巨大潜力。
迈向可靠的无人机山区定位……
主要关键词


相关文件推荐




























