机构名称:
¥ 1.0
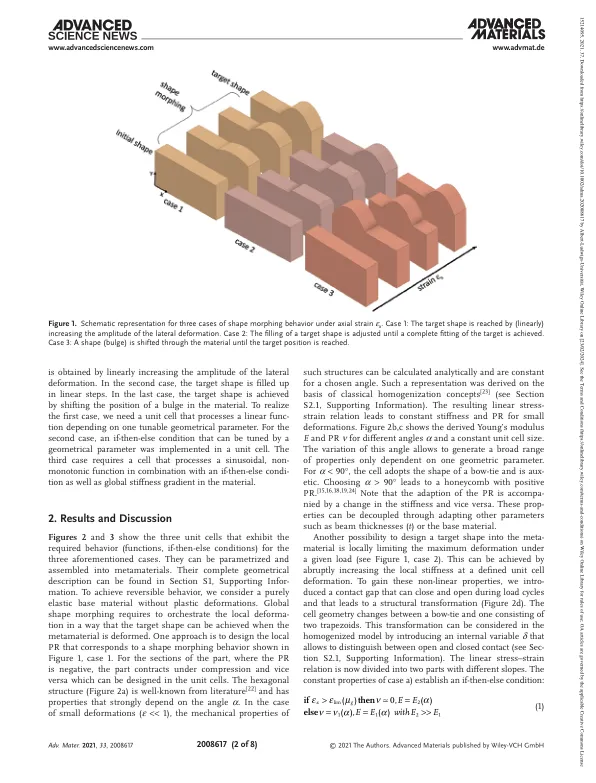
易于解除的概念只能通过概念来实现。[1-3]已经在许多尺度和不同的外部触发器上研究了设备中特定形状变形行为的实现。[4]一方面,在系统级别上有许多方法通常由电动机[3,5]压电剂[6,7]或多物质系统驱动,例如,二型。[8]另一方面,通过适应微结构的几何形状可以实现形状变形。这可以在原子量表上进行,例如,使用相变和梯度以及μm -cm水平。多年来,在材料中设计了诸如Poisson的比率(PR)和Young模量之类的线性有效属性。[9] Greaves等。[10]介绍了结构并实现属性的概述。在1990年代已经显示了极端材料的弹性张量,[11]但是它们的实际实力主要是近年来制造技术的发展驱动的。在超材料中,定期布置的单元细胞的特性克服了自然界中发现的特性[12,13](例如,负PR [14-16]和高刚度 - 重量率[17])。此外,添加剂制造可以轻松地更改材料本地单元单元的几何特征(梁厚度,角度)。这种方法可以使所谓的渐变材料中材料特性的不均匀分布,在加载过程中可能导致不同的形状。可以用处理函数和如果以前的条件来描述这种行为。[18–21]设计形状变形行为不仅需要控制恒定属性,而且还需要控制它们进化的方式,例如菌株依赖性PR。在本文中,我们提出了在单位细胞中整合机械机制的不同方式,从而导致各种非线性弹性(但仍然受控)行为。细胞已组装成宏观材料,并且通过适应晶胞的几何参数的适应,局部调整了功能和条件。分布在材料中的不同特性(刚度,PR)的组合导致垂直于施加载荷的特定形状,也显示在参考文献中。[18,19]。此外,逻辑语句允许我们对材料形状进行全局程序。在下文中,我们将显示三种情况如何从增加应变下从初始形状转换为目标形状(见图1)。在第一种情况下,目标形状
通过机械超材料的局部编程来设计形状变形行为
主要关键词

相关文件推荐