机构名称:
¥ 1.0
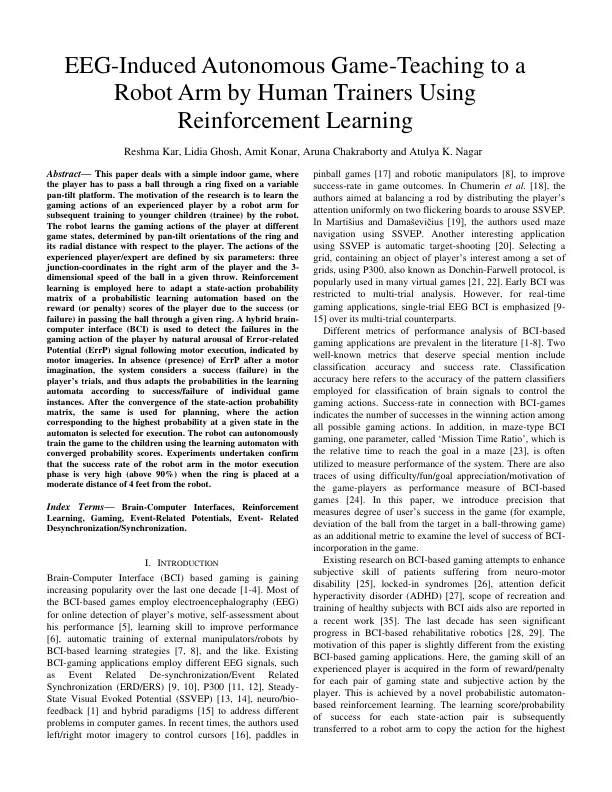
摘要 — 本文讨论了一个简单的室内游戏,玩家必须将球穿过固定在可变云台平台上的环。这项研究的动机是通过机械臂学习有经验的玩家的游戏动作,以便随后由机器人训练年幼的儿童(受训者)。机器人学习玩家在不同游戏状态下的游戏动作,这些动作由环的云台方向及其相对于玩家的径向距离决定。有经验的玩家/专家的动作由六个参数定义:玩家右臂的三个连接坐标和给定投掷中球的三维速度。这里采用强化学习来调整概率学习自动化的状态动作概率矩阵,该矩阵基于玩家因成功(或失败)将球穿过给定环而获得的奖励(或惩罚)分数。混合脑机接口 (BCI) 用于检测玩家游戏动作中的失败,通过在运动执行后自然唤醒错误相关电位 (ErrP) 信号,由运动想象指示。在运动想象后没有 (存在) ErrP 的情况下,系统认为玩家的尝试是成功 (失败),从而根据各个游戏实例的成功/失败调整学习自动机中的概率。在状态动作概率矩阵收敛后,将其用于规划,其中选择与自动机中给定状态下最高概率相对应的动作进行执行。机器人可以使用具有收敛概率分数的学习自动机自主地训练儿童游戏。进行的实验证实,当环放置在距离机器人 4 英尺的中等距离时,机器人手臂在运动执行阶段的成功率非常高 (超过 90%)。索引词——脑机接口、强化学习、游戏、事件相关电位、事件相关去同步/同步。
通过脑电图诱导的机械臂自主游戏教学...
主要关键词



相关文件推荐