机构名称:
¥ 1.0
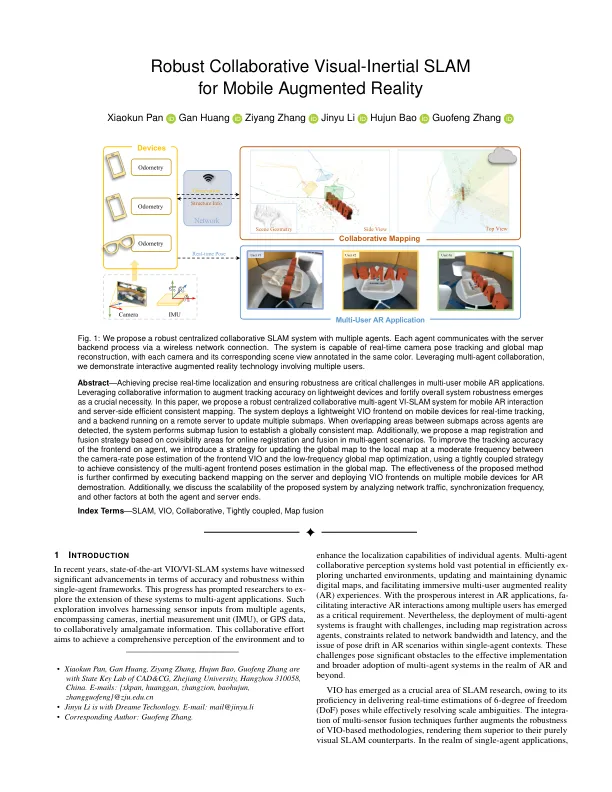
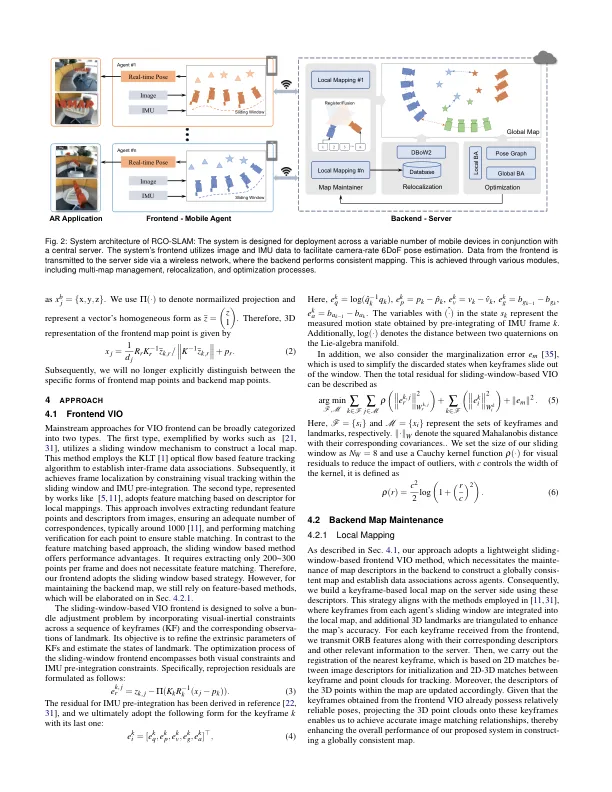
摘要 - 在多用户移动AR应用程序中确保精确的实时本地化并确保鲁棒性是关键挑战。利用协作信息来增强轻量级设备的跟踪准确性,并强化整体系统的鲁棒性是至关重要的。在本文中,我们提出了一个可靠的集中式协作多代理VI-SLAM系统,用于移动AR交互和服务器端有效的一致映射。该系统在移动设备上部署了轻巧的VIO前端,以进行实时跟踪,并在远程服务器上运行的后端以更新多个子包。当检测到跨代理之间的跨代理之间的重叠区域时,系统执行子束融合以建立全球一致的图。此外,我们提出了一个基于在线注册和融合的多代理场景中的可覆盖率领域的地图注册和融合策略。为了提高前端对代理的跟踪准确性,我们介绍了一种策略,以将全局地图更新为本地地图,以中等频率的摄像机率姿势估计前端VIO和低频全局地图优化,使用紧密耦合的策略,以实现全局图中的多代数前端估计的一致性。通过在服务器上执行后端映射并在多个移动设备上部署VIO前端以进行AR排除,从而进一步确认了所提出的方法的有效性。此外,我们通过分析代理和服务器结束的网络流量,同步频率以及其他因素来讨论提出系统的可扩展性。
适用于移动增强现实的强大协作视觉惯性大满贯
主要关键词



相关文件推荐