机构名称:
¥ 1.0
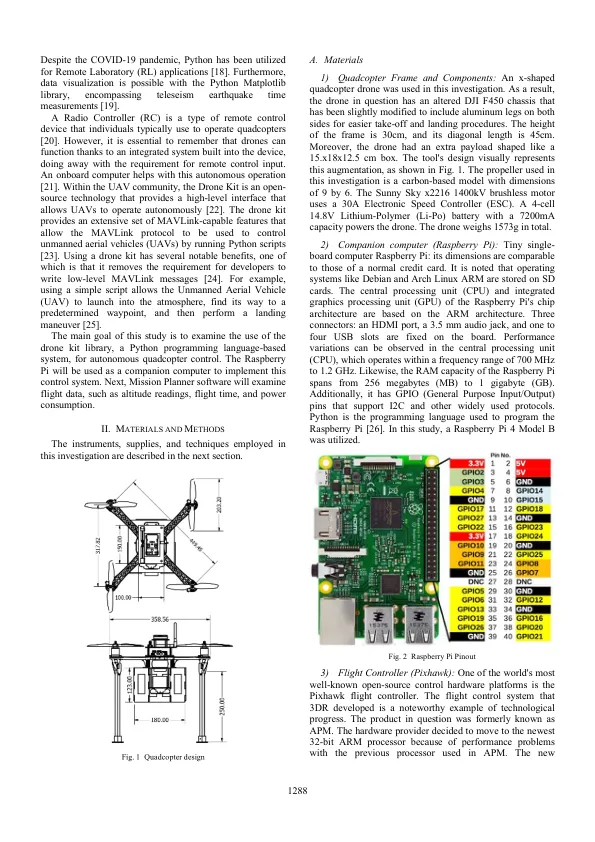
摘要 - 在Mavlink协议上使用Python脚本,开发人员可以使用开源Dronekit Python软件框架来启用自动无人机操作。此框架提供了出色的灵活性和功能,可促进自动无人机控制。构建的四轮驱动器具有X配置,并使用带有一些修改的DJI F450帧。有趣的是,无人机在两侧都有铝制的腿,以帮助进行平稳起飞和着陆。框架为45厘米,对角线长度和30厘米的垂直高度。在15 x 18 x 12.5厘米的盒子中给出了额外的重量。本研究中使用的螺旋桨是一个基于9x6的碳模型。使用的X2216 1400KV无刷电动机来自Sunnysky,它带有30A等级的电子速度控制器(ESC)。4细胞14.8V锂聚合物(LI-PO)电池具有7200mAh容量为无人机供电。除此之外,无人机总共重1573克。结果是通过自我测量和飞行测量数据(FMU)获得的。进行了六次尝试,结果表明第二次飞行时间最长,高度最高。特别是,飞行测量单元(FMU)报告说,飞行持续了81秒,达到0.93米的高度。相反,自我测量数据报告说,飞行持续了85秒,高度达到1.5米。
无人机套件 - 适用于自动脉动四肢导航
主要关键词

相关文件推荐