机构名称:
¥ 1.0
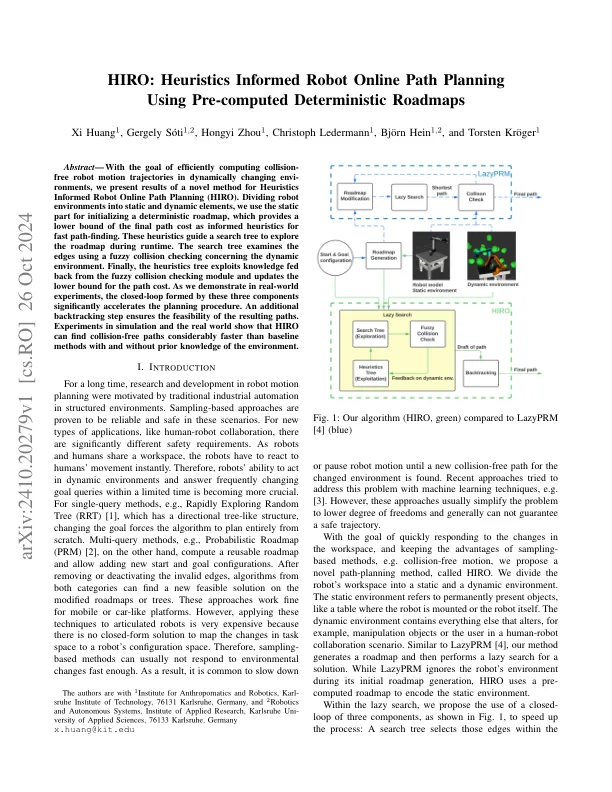
摘要 - 为了有效计算动态变化的环境中的无机器人运动轨迹,我们介绍了一种新型的启发式启发式启发式方法的方法的结果。将机器人环境分为静态和动态元素,我们使用静态零件来初始化确定性路线图,该路线图提供了最终路径成本的下限,如知情的启发式方法,用于快速路径找到。这些启发式方法指导搜索树以探索运行时的路线图。搜索树使用有关动态环境的模糊碰撞检查检查边缘。最后,启发式树利用了从模糊碰撞检查模块中提供的知识,并更新了路径成本的下限。正如我们在现实世界实验中所证明的那样,这三个组件形成的闭环会显着加速计划程序。另一个回溯步骤可确保所得路径的可行性。模拟和现实世界中的实验表明,Hiro可以发现无碰撞的路径比有或没有对环境的先验知识的基线方法快得多。
启发式知识的机器人在线路径计划使用pre-...
主要关键词



相关文件推荐