机构名称:
¥ 1.0
精确操作是指机器人在综合环境中表现出高度准确,细致和灵活的任务的能力[17],[18]。该领域的研究重点是高精度控制和对动态条件的适应性。使用运动学模型和动态模型以实现结构化设置中的精确定位和组装[19],依靠刚性机械设计和模型驱动的控制依赖于刚性机械设计和模型驱动的控制。最近,深度学习和强化学习改善了动态环境中的机器人适应性[20],[21],而视觉和触觉感应的进步使千分尺级的精度在握把,操纵和组装方面[22]。此外,多机器人协作还允许更复杂和协调的精确任务。尽管取得了重大进展,但在多尺度操作整合,动态干扰补偿和低延迟相互作用中仍然存在挑战[23]。未来的研究应进一步改善交叉模态信息的实时对齐,并增强非结构化环境中机器人视觉的鲁棒性,以优化精确的操纵能力。
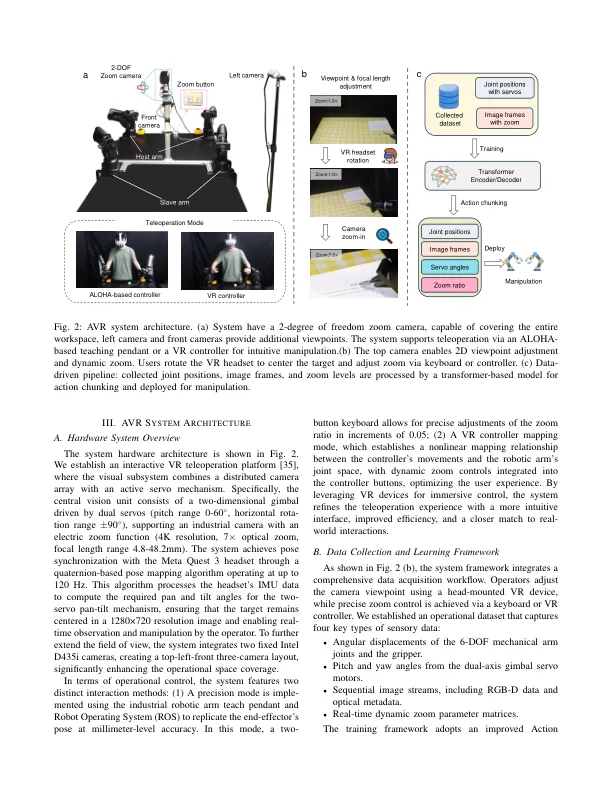
AVR:主动视力驱动的机器人精确操作,具有视点和焦距优化
主要关键词




相关文件推荐