机构名称:
¥ 3.0
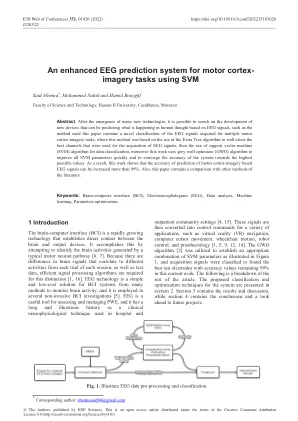
人类机器人协作(HRC)依赖于对人类意图的准确和及时认识以确保无缝相互作用。在常见的HRC任务中,已经广泛研究了人身到机器人的对象移交,以计划在对象接收期间的机器人行动,假设人类的对象移交意图。但是,将移交意图与其他动作区分开来,受到了有限的关注。大多数对Han-Dovers的研究都集中在视觉检测运动轨迹上,这通常会导致轨迹重叠时延迟或错误检测。本文研究了人类对物体移交的意图是否反映在基于非运动的生理信号中。我们进行了比较三种数据模式的多模式分析:脑电图(EEG),凝视和手动信号。我们的研究旨在区分HRC环境中的移交预期的动作和非移交动作,从而评估每种形态在预测和之后人类运动开始之前和之后对这些行为进行分类时的表现。我们根据这些方式开发和评估人类意图探测器,比较它们在识别切换意图方面的准确性和时机。据我们所知,这是在人类机器人移交的相同实验环境中系统地开发和测试意图探测器的第一项研究。 我们的分析表明,移交意图可以是据我们所知,这是在人类机器人移交的相同实验环境中系统地开发和测试意图探测器的第一项研究。我们的分析表明,移交意图可以是
比较脑电图,凝视和手动运动
主要关键词





相关文件推荐