机构名称:
¥ 1.0
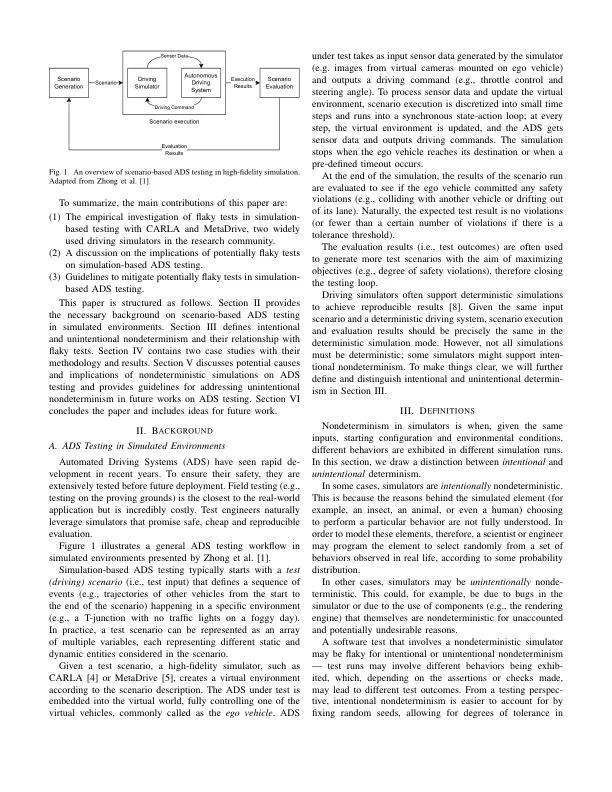
摘要 - 在自主驾驶系统(ADS)测试中,测试场景是预定的,特定的事件序列,包括静态实体(例如道路形状和交通标志)和动态实体(例如,交通信号灯和周围车辆的轨迹)。通过根据测试方案创建环境并在该环境中运行正在测试的广告,我们可以验证广告是否造成任何违反安全性(例如,与其他车辆的碰撞)。由于与现实世界中的测试方案相关的高成本和风险,基于模拟的测试依赖于可以创建各种虚拟驾驶环境的驱动模拟器,因此引起了极大的关注。由于模拟环境可以比现实世界更确定性,因此基于模拟的测试可以提供非粉状测试,即,从理论上讲,相同的测试场景(和相同的ADS)相同的测试结果。但是,在基于模拟的广告测试中,我们真的没有片状测试吗?本文使用两个广泛使用的开源驾驶模拟器:CARLA和MetAdrive在基于模拟的ADS测试中进行经验研究。我们的结果表明,令人惊讶的是,由于卡拉中的非确定模拟,基准测试方案的31.3%可能是片状的,而元素没有产生任何片状测试。我们进一步讨论了非确定模拟的潜在原因,片状测试在ADS测试中的含义以及减轻未来工作中片状的实用策略。
凭经验评估模拟环境中自动驾驶系统的片状测试
主要关键词




相关文件推荐